Re: rtabmap don't recognize the ground and the graph view is full of obstacle
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-don-t-recognize-the-ground-and-the-graph-view-is-full-of-obstacle-tp2090p2095.html
Hi,
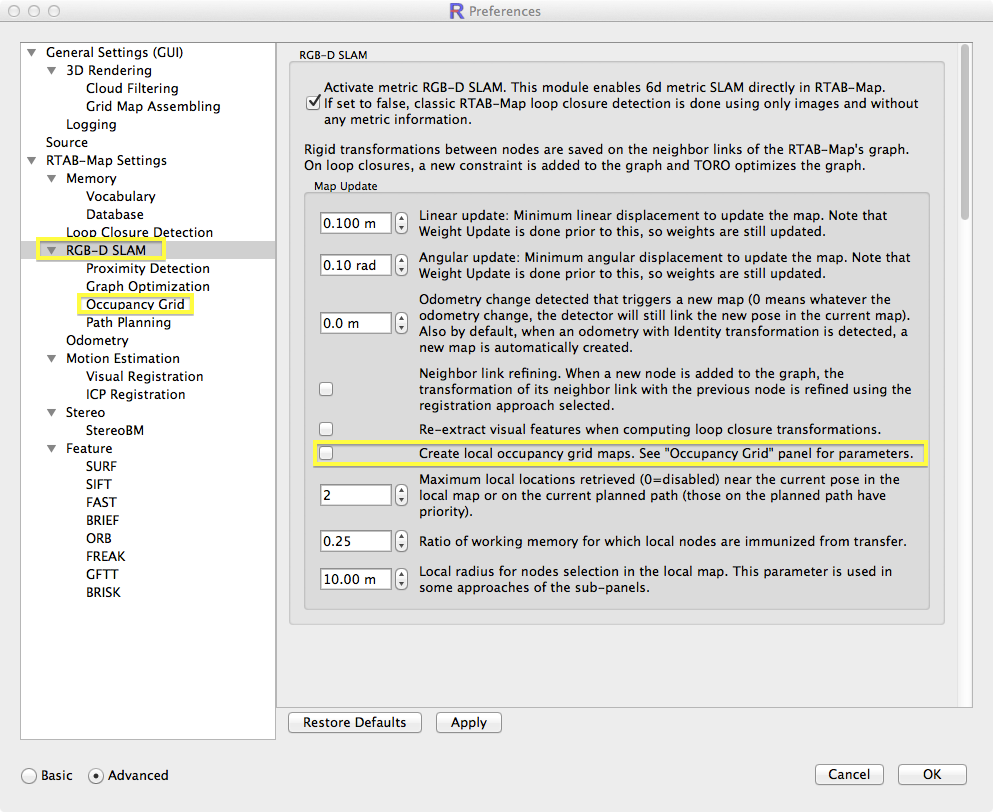
Q1: On the standalone, the grid map generation is disabled by default. On ROS, it is activated by default. You can activate it under the RGB-D SLAM panel in Preferences. Make sure when you start the camera it is not tilted or check "Align odometry with ground on initialization" option in Odometry panel (to automatically detect the ground).
Q2: On which computer you are trying the standalone? (Mac OS X, Windows?) Normally for standalone binaries, OpenNI2 should be available.
Q3: The laser scan generation option in the standalone will create only a 3D point cloud (for 3D ICP purpose), not a 2d scan. To get a 2D laser scan from the Kinect, use depthimage_to_laserscan in ROS.
Note that if you plan to use rtabmap on a robot, I strongly recommend to use only the ROS package (rtabmap_ros). The standalone won't give you any real-time outputs, just visualization and stop->export options.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-don-t-recognize-the-ground-and-the-graph-view-is-full-of-obstacle-tp2090p2095.html
Hi,
Q1: On the standalone, the grid map generation is disabled by default. On ROS, it is activated by default. You can activate it under the RGB-D SLAM panel in Preferences. Make sure when you start the camera it is not tilted or check "Align odometry with ground on initialization" option in Odometry panel (to automatically detect the ground).
Q2: On which computer you are trying the standalone? (Mac OS X, Windows?) Normally for standalone binaries, OpenNI2 should be available.
Q3: The laser scan generation option in the standalone will create only a 3D point cloud (for 3D ICP purpose), not a 2d scan. To get a 2D laser scan from the Kinect, use depthimage_to_laserscan in ROS.
Note that if you plan to use rtabmap on a robot, I strongly recommend to use only the ROS package (rtabmap_ros). The standalone won't give you any real-time outputs, just visualization and stop->export options.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |