rtab map navigation stack error
Posted by shashank on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtab-map-navigation-stack-error-tp2158.html
hii,
I am getting error while setting navigation stack using rtab map.The is no cmd/vel being published .
please help me out with this
here are my files
base_local_planner.yaml
TrajectoryPlannerROS:
# Current limits based on AZ3 standalone configuration.
acc_lim_x: 0.75
acc_lim_y: 0.75
acc_lim_theta: 4
# min_vel_x and max_rotational_vel were set to keep the ICR at
# minimal distance of 0.48 m.
# Basically, max_rotational_vel * rho_min <= min_vel_x
max_vel_x: 0.5
min_vel_x: 0.24
max_vel_theta: 0.5
min_vel_theta: -0.5
min_in_place_vel_theta: 0.25
holonomic_robot: true
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 0.25
latch_xy_goal_tolerance: true
# make sure that the minimum velocity multiplied by the sim_period is less than twice the tolerance on a goal. Otherwise, the robot will prefer to rotate in place just outside of range of its target position rather than moving towards the goal.
sim_time: 1.5 # set between 1 and 2. The higher he value, the smoother the path (though more samples would be required).
sim_granularity: 0.025
angular_sim_granularity: 0.05
vx_samples: 12
vtheta_samples: 20
meter_scoring: true
pdist_scale: 0.7 # The higher will follow more the global path.
gdist_scale: 0.8
occdist_scale: 0.01
publish_cost_grid_pc: false
#move_base
controller_frequency: 10.0 #The robot can move faster when higher.
#global planner
NavfnROS:
allow_unknown: true
visualize_potential: false
costmap_common_params.yaml
obstacle_range: 10
max_obstacle_height: 2.0
raytrace_range: 5.0
footprint: [[ 0.315, 0.4125], [-0.315, 0.32505], [-0.315, -0.32505], [ 0.3, -0.4125]]
footprint_padding: 0.03
#robot_radius: ir_of_robot
inflation_radius: 0.55
transform_tolerance: 2
controller_patience: 2.0
NavfnROS:
allow_unknown: true
recovery_behaviors: [
{name: conservative_clear, type: clear_costmap_recovery/ClearCostmapRecovery},
{name: aggressive_clear, type: clear_costmap_recovery/ClearCostmapRecovery}
]
conservative_clear:
reset_distance: 3.00
aggressive_clear:
reset_distance: 1.84
costmap_common_params_2d.yaml
footprint: [[ 0.315, 0.4125], [-0.315, 0.32505], [-0.315, -0.32505], [ 0.3, -0.4125]]
footprint_padding: 0.04
inflation_layer:
inflation_radius: 0.7 # 2xfootprint, it helps to keep the global planned path farther from obstacles
transform_tolerance: 2
obstacle_layer:
obstacle_range: 5.0
raytrace_range: 5.0
max_obstacle_height: 0.4
track_unknown_space: true
observation_sources: laser_scan_sensor point_cloud_sensorA
laser_scan_sensor: {
data_type: LaserScan,
topic: /scan,
expected_update_rate: 5.0,
marking: true,
clearing: true,
# observation_persistence: 0.0,
# min_obstacle_height: -0.10,
# max_obstacle_height: 2.0
}
point_cloud_sensorA: {
sensor_frame: zed_optical_frame,
data_type: PointCloud2,
topic: /camera/point_cloud/cloud,
expected_update_rate: 5.0,
marking: true,
clearing: true,
min_obstacle_height: -0.10,
max_obstacle_height: 2.0
}
global_costmap_params.yaml
#global_costmap
global_frame: map
robot_base_frame: base_link
update_frequency: 1
publish_frequency: 1
always_send_full_costmap: false
plugins:
- {name: static_layer, type: "rtabmap_ros::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
local_costmap_param.yaml
global_frame: odom
robot_base_frame: base_link
update_frequency: 2
publish_frequency: 1
rolling_window: true
width: 3.0
height: 3.0
resolution: 0.025
origin_x: 0
origin_y: 0
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
local_costmap_params_2d.yaml
global_frame: odom
robot_base_frame: base_link
update_frequency: 2.0
publish_frequency: 2.0
rolling_window: true
width: 5.0
height: 5.0
resolution: 0.025
origin_x: 0.0
origin_y: 0.0
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
obstacle_layer:
obstacle_range: 5.0
raytrace_range: 5.0
max_obstacle_height: 0.02
track_unknown_space: true
observation_sources: laser_scan_sensor point_cloud_sensorA
laser_scan_sensor: {
data_type: LaserScan,
topic: /scan,
expected_update_rate: 0.1,
marking: true,
clearing: true
}
point_cloud_sensorA: {
sensor_frame: zed_optical_frame,
data_type: PointCloud2,
topic: /camera/point_cloud/cloud,
expected_update_rate: 5.0,
marking: true,
clearing: true,
min_obstacle_height: -99999.0,
max_obstacle_height: 99999.
}
planner_launch file
<launch>
<group ns="planner">
<node pkg="move_base" type="move_base" respawn="true" name="move_base" output="screen">
<remap from="/ratabmap/odom" to="/planner/odom"/>
<remap from="scan" to="/base_scan"/>
<remap from="obstacles_cloud" to="/obstacles_cloud"/>
<remap from="ground_cloud" to="/ground_cloud"/>
<remap from="map" to="/map"/>
<remap from="move_base_simple/goal" to="/planner_goal"/>
<rosparam file="/home/cair/zed_ws/src/rtabmap_ros/launch/nav_config_2/costmap_common_params_2d.yaml" command="load" ns="global_costmap"/>
<rosparam file="/home/cair/zed_ws/src/rtabmap_ros/launch/nav_config_2/costmap_common_params_2d.yaml" command="load" ns="local_costmap" />
<rosparam file="/home/cair/zed_ws/src/rtabmap_ros/launch/nav_config_2/local_costmap_params.yaml" command="load" ns="local_costmap" />
<rosparam file="/home/cair/zed_ws/src/rtabmap_ros/launch/nav_config_2/global_costmap_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="/home/cair/zed_ws/src/rtabmap_ros/launch/nav_config_2/base_local_planner_params.yaml" command="load" />
</node>
</group>
<group ns="camera">
<node pkg="nodelet" type="nodelet" name="data_throttle" args="load rtabmap_ros/data_throttle camera_nodelet_manager">
<remap from="rgb/image_in" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image_in" to="/camera/depth/image_rect_color"/>
<remap from="rgb/camera_info_in" to="/camera/rgb/camera_info"/>
<remap from="rgb/image_out" to="data_resized_image"/>
<remap from="depth/image_out" to="data_resized_image_depth"/>
<remap from="rgb/camera_info_out" to="data_resized_camera_info"/>
</node>
<node pkg="nodelet" type="nodelet" name="points_xyz_planner" args="load rtabmap_ros/point_cloud_xyz camera_nodelet_manager">
<remap from="depth/image" to="data_resized_image_depth"/>
<remap from="depth/camera_info" to="data_resized_camera_info"/>
<remap from="cloud" to="cloudXYZ" />
</node>
<node pkg="nodelet" type="nodelet" name="obstacles_detection" args="load rtabmap_ros/obstacles_detection camera_nodelet_manager">
<remap from="cloud" to="cloudXYZ"/>
<remap from="obstacles" to="/obstacles_cloud"/>
<remap from="ground" to="/ground_cloud"/>
</node>
</group>
</launch>
rtabmap ros file
<launch>
<arg name="stereo" default="false"/>
<arg name="rtabmapviz" default="true" />
<arg name="rviz" default="true" />
<arg name="localization" default="false"/>
<arg name="cfg" default="" />
<arg name="gui_cfg" default="~/.ros/rtabmap_gui.ini" />
<arg name="rviz_cfg" default="-d $(find rtabmap_ros)/launch/config/rgbd.rviz" />
<arg name="frame_id" default="base_link"/>
<arg name="namespace" default="rtabmap"/>
<arg name="database_path" default="~/.ros/rtabmap.db"/>
<arg name="queue_size" default="20"/>
<arg name="wait_for_transform" default="2.0"/>
<arg name="rtabmap_args" default="delete_db_on_start"/>
<arg name="launch_prefix" default=""/>
<arg name="approx_sync" default="true"/>
<arg name="rgb_topic" default="/camera/rgb/image_rect_color" />
<arg name="depth_topic" default="/camera/depth/image_rect_color" />
<arg name="camera_info_topic" default="/camera/rgb/camera_info" />
<arg name="rgb_image_transport" default="compressed"/>
<arg name="subscribe_scan" default="false"/>
<arg name="scan_topic" default="/base_scan"/>
<arg name="subscribe_scan_cloud" default="false"/>
<arg name="scan_cloud_topic" default="/scan_cloud"/>
<arg name="visual_odometry" default="true"/>
<arg name="odom_topic" default="/odom"/>
<arg name="odom_frame_id" default=""/>
<arg name="odom_args" default="$(arg rtabmap_args)"/>
<group ns="$(arg namespace)">
<group>
<node if="$(arg visual_odometry)" pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="screen" args="$(arg odom_args)" launch-prefix="$(arg launch_prefix)">
<remap from="rgb/image" to="$(arg rgb_topic)"/>
<remap from="depth/image" to="$(arg depth_topic)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
</node>
</group>
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="$(arg rtabmap_args)" launch-prefix="$(arg launch_prefix)">
<remap from="rgb/image" to="$(arg rgb_topic)"/>
<remap from="depth/image" to="$(arg depth_topic)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
<remap from="goal_out" to="current_goal"/>
<remap from="move_base" to="/planner/move_base"/>
<remap from="grid_map" to="/map"/>
<remap from="scan_cloud" to="$(arg scan_cloud_topic)"/>
<remap unless="$(arg visual_odometry)" from="odom" to="$(arg odom_topic)"/>
</node>
</group>
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="$(arg rviz_cfg)"/>
<node if="$(arg rviz)" pkg="nodelet" type="nodelet" name="points_xyzrgb" args="standalone rtabmap_ros/point_cloud_xyzrgb">
<remap from="rgb/image" to="$(arg rgb_topic)"/>
<remap from="depth/image" to="$(arg depth_topic)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
<remap from="cloud" to="voxel_cloud" />
</node>
</launch>
error while launching navigation
/camera/data_throttle/decimation: 2
* /camera/data_throttle/rate: 5.0
* /camera/obstacles_detection/frame_id: base_link
* /camera/obstacles_detection/map_frame_id: map
* /camera/obstacles_detection/max_obstacles_height: 0.4
* /camera/obstacles_detection/min_cluster_size: 20
* /camera/obstacles_detection/wait_for_transform: True
* /camera/points_xyz_planner/decimation: 1
* /camera/points_xyz_planner/max_depth: 3.0
* /camera/points_xyz_planner/voxel_size: 0.02
* /planner/cmd_vel/abtr_priority: 10
* /planner/move_base/NavfnROS/allow_unknown: True
* /planner/move_base/NavfnROS/visualize_potential: False
* /planner/move_base/TrajectoryPlannerROS/acc_lim_theta: 4
* /planner/move_base/TrajectoryPlannerROS/acc_lim_x: 0.75
* /planner/move_base/TrajectoryPlannerROS/acc_lim_y: 0.75
* /planner/move_base/TrajectoryPlannerROS/angular_sim_granularity: 0.05
* /planner/move_base/TrajectoryPlannerROS/gdist_scale: 0.8
* /planner/move_base/TrajectoryPlannerROS/holonomic_robot: True
* /planner/move_base/TrajectoryPlannerROS/latch_xy_goal_tolerance: True
* /planner/move_base/TrajectoryPlannerROS/max_vel_theta: 0.5
* /planner/move_base/TrajectoryPlannerROS/max_vel_x: 0.5
* /planner/move_base/TrajectoryPlannerROS/meter_scoring: True
* /planner/move_base/TrajectoryPlannerROS/min_in_place_vel_theta: 0.25
* /planner/move_base/TrajectoryPlannerROS/min_vel_theta: -0.5
* /planner/move_base/TrajectoryPlannerROS/min_vel_x: 0.24
* /planner/move_base/TrajectoryPlannerROS/occdist_scale: 0.01
* /planner/move_base/TrajectoryPlannerROS/pdist_scale: 0.7
* /planner/move_base/TrajectoryPlannerROS/publish_cost_grid_pc: False
* /planner/move_base/TrajectoryPlannerROS/sim_granularity: 0.025
* /planner/move_base/TrajectoryPlannerROS/sim_time: 1.5
* /planner/move_base/TrajectoryPlannerROS/vtheta_samples: 20
* /planner/move_base/TrajectoryPlannerROS/vx_samples: 12
* /planner/move_base/TrajectoryPlannerROS/xy_goal_tolerance: 0.25
* /planner/move_base/TrajectoryPlannerROS/yaw_goal_tolerance: 0.25
* /planner/move_base/base_global_planner: navfn/NavfnROS
* /planner/move_base/controller_frequency: 10.0
* /planner/move_base/global_costmap/always_send_full_costmap: False
* /planner/move_base/global_costmap/footprint: [[0.315, 0.4125],...
* /planner/move_base/global_costmap/footprint_padding: 0.04
* /planner/move_base/global_costmap/global_frame: map
* /planner/move_base/global_costmap/inflation_layer/inflation_radius: 0.7
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/clearing: True
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/data_type: LaserScan
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/expected_update_rate: 5.0
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/marking: True
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/topic: /scan
* /planner/move_base/global_costmap/obstacle_layer/max_obstacle_height: 0.4
* /planner/move_base/global_costmap/obstacle_layer/observation_sources: laser_scan_sensor...
* /planner/move_base/global_costmap/obstacle_layer/obstacle_range: 5.0
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/clearing: True
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/data_type: PointCloud2
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/expected_update_rate: 5.0
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/marking: True
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/max_obstacle_height: 2.0
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/min_obstacle_height: -0.1
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/sensor_frame: zed_optical_frame
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/topic: /camera/point_clo...
* /planner/move_base/global_costmap/obstacle_layer/raytrace_range: 5.0
* /planner/move_base/global_costmap/obstacle_layer/track_unknown_space: True
* /planner/move_base/global_costmap/plugins: [{'type': 'rtabma...
* /planner/move_base/global_costmap/publish_frequency: 1
* /planner/move_base/global_costmap/robot_base_frame: base_link
* /planner/move_base/global_costmap/transform_tolerance: 2
* /planner/move_base/global_costmap/update_frequency: 1
* /planner/move_base/local_costmap/footprint: [[0.315, 0.4125],...
* /planner/move_base/local_costmap/footprint_padding: 0.04
* /planner/move_base/local_costmap/global_frame: odom
* /planner/move_base/local_costmap/height: 3.0
* /planner/move_base/local_costmap/inflation_layer/inflation_radius: 0.7
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/clearing: True
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/data_type: LaserScan
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/expected_update_rate: 5.0
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/marking: True
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/topic: /scan
* /planner/move_base/local_costmap/obstacle_layer/max_obstacle_height: 0.4
* /planner/move_base/local_costmap/obstacle_layer/observation_sources: laser_scan_sensor...
* /planner/move_base/local_costmap/obstacle_layer/obstacle_range: 5.0
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/clearing: True
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/data_type: PointCloud2
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/expected_update_rate: 5.0
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/marking: True
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/max_obstacle_height: 2.0
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/min_obstacle_height: -0.1
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/sensor_frame: zed_optical_frame
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/topic: /camera/point_clo...
* /planner/move_base/local_costmap/obstacle_layer/raytrace_range: 5.0
* /planner/move_base/local_costmap/obstacle_layer/track_unknown_space: True
* /planner/move_base/local_costmap/origin_x: 0
* /planner/move_base/local_costmap/origin_y: 0
* /planner/move_base/local_costmap/plugins: [{'type': 'costma...
* /planner/move_base/local_costmap/publish_frequency: 1
* /planner/move_base/local_costmap/resolution: 0.025
* /planner/move_base/local_costmap/robot_base_frame: base_link
* /planner/move_base/local_costmap/rolling_window: True
* /planner/move_base/local_costmap/transform_tolerance: 2
* /planner/move_base/local_costmap/update_frequency: 2
* /planner/move_base/local_costmap/width: 3.0
* /rosdistro: indigo
* /rosversion: 1.11.20
NODES
/camera/
data_throttle (nodelet/nodelet)
obstacles_detection (nodelet/nodelet)
points_xyz_planner (nodelet/nodelet)
/planner/
move_base (move_base/move_base)
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[planner/move_base-1]: started with pid [29108]
process[camera/data_throttle-2]: started with pid [29109]
process[camera/points_xyz_planner-3]: started with pid [29110]
process[camera/obstacles_detection-4]: started with pid [29112]
[ INFO] [1476964977.905537558]: Using plugin "static_layer"
[ INFO] [1476964978.181519481]: Requesting the map...
[ INFO] [1476964978.387590702]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964978.486638496]: Received a 107 X 145 map at 0.050000 m/pix
[ INFO] [1476964978.495737293]: Using plugin "obstacle_layer"
[ INFO] [1476964978.555910524]: Subscribed to Topics: laser_scan_sensor point_cloud_sensorA
[ INFO] [1476964978.599178143]: Using plugin "inflation_layer"
[ INFO] [1476964978.706693874]: pluginlib WARNING: In file /tmp/binarydeb/ros-indigo-navfn-1.12.12/src/navfn_ros.cpp PLUGINLIB_DECLARE_CLASS is deprecated, please use PLUGINLIB_EXPORT_CLASS instead. You can run the script 'plugin_macro_update' provided with pluginlib in your package source folder to automatically and recursively update legacy macros. Base = base_class_type, Derived = derived_class_type
[ INFO] [1476964978.735726182]: Using plugin "obstacle_layer"
[ INFO] [1476964978.810067571]: Subscribed to Topics: laser_scan_sensor point_cloud_sensorA
[ INFO] [1476964978.869518219]: Using plugin "inflation_layer"
[ INFO] [1476964978.988422221]: Created local_planner base_local_planner/TrajectoryPlannerROS
[ INFO] [1476964979.001261247]: Sim period is set to 0.10
[ INFO] [1476964979.991212399]: pluginlib WARNING: In file /tmp/binarydeb/ros-indigo-clear-costmap-recovery-1.12.12/src/clear_costmap_recovery.cpp PLUGINLIB_DECLARE_CLASS is deprecated, please use PLUGINLIB_EXPORT_CLASS instead. You can run the script 'plugin_macro_update' provided with pluginlib in your package source folder to automatically and recursively update legacy macros. Base = base_class_type, Derived = derived_class_type
[ INFO] [1476964979.994665380]: Recovery behavior will clear layer obstacles
[ INFO] [1476964980.051337114]: pluginlib WARNING: In file /tmp/binarydeb/ros-indigo-rotate-recovery-1.12.12/src/rotate_recovery.cpp PLUGINLIB_DECLARE_CLASS is deprecated, please use PLUGINLIB_EXPORT_CLASS instead. You can run the script 'plugin_macro_update' provided with pluginlib in your package source folder to automatically and recursively update legacy macros. Base = base_class_type, Derived = derived_class_type
[ INFO] [1476964980.061984842]: Recovery behavior will clear layer obstacles
[ INFO] [1476964980.092542546]: Resizing costmap to 107 X 147 at 0.050000 m/pix
[ INFO] [1476964980.919452250]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964982.024934940]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964983.012641040]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964983.984434549]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476964985.031318891]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964986.067769286]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964987.176541154]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964988.284935377]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964989.290634837]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476964990.242850059]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964991.394449335]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476964992.332081949]: Resizing costmap to 107 X 147 at 0.050000 m/pix
[ INFO] [1476964993.393790149]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964994.482335182]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964995.480345235]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964996.527608326]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964997.544350962]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964998.670003063]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964999.695018262]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965000.739881147]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965001.804525224]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965002.754938408]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965003.830864638]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965004.793107210]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965005.884564684]: Resizing costmap to 107 X 147 at 0.050000 m/pix
[ INFO] [1476965006.908325272]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965007.908508296]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965008.985224217]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965010.081895892]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965011.077050379]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965012.190715975]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965013.308658571]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965014.404737725]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965015.475315963]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965016.448837499]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965017.451843079]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965018.539765686]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ WARN] [1476965018.674021099]: Illegal bounds change, was [tl: (-0.478373, -3.318025), br: (4.871627, 3.931975)], but is now [tl: (-0.501825, -1.988850), br: (4.846004, 3.876735)]. The offending layer is global_costmap/obstacle_layer
[ INFO] [1476965019.507384363]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965020.550296630]: Resizing costmap to 107 X 147 at 0.050000 m/pix
[ WARN] [1476965020.650598350]: Illegal bounds change, was [tl: (-0.478516, -3.435339), br: (4.871484, 3.914661)], but is now [tl: (-0.496089, -1.997612), br: (4.845046, 3.868937)]. The offending layer is global_costmap/obstacle_layer
[ INFO] [1476965021.584950000]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ WARN] [1476965021.683805419]: Illegal bounds change, was [tl: (-0.477935, -3.382375), br: (4.872065, 3.917625)], but is now [tl: (-0.492186, -2.201555), br: (4.847005, 3.866617)]. The offending layer is global_costmap/obstacle_layer
[ INFO] [1476965022.607655292]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ WARN] [1476965022.698249213]: Illegal bounds change, was [tl: (-0.478719, -3.380401), br: (4.871281, 3.919599)], but is now [tl: (-0.486803, -3.102980), br: (4.846062, 3.860420)]. The offending layer is global_costmap/obstacle_layer
[ INFO] [1476965023.681956359]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965024.657954606]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965025.663194502]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ WARN] [1476965025.751626562]: InflationLayer::updateCosts(): seen_ array size is wrong
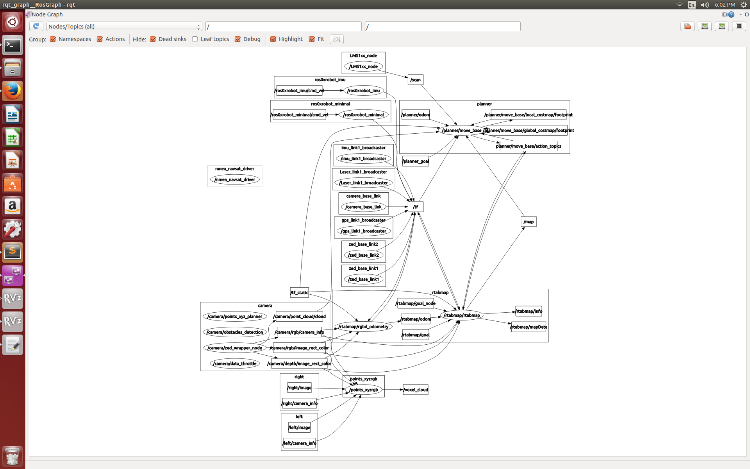
my rqt graph
thanks
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtab-map-navigation-stack-error-tp2158.html
hii,
I am getting error while setting navigation stack using rtab map.The is no cmd/vel being published .
please help me out with this
here are my files
base_local_planner.yaml
TrajectoryPlannerROS:
# Current limits based on AZ3 standalone configuration.
acc_lim_x: 0.75
acc_lim_y: 0.75
acc_lim_theta: 4
# min_vel_x and max_rotational_vel were set to keep the ICR at
# minimal distance of 0.48 m.
# Basically, max_rotational_vel * rho_min <= min_vel_x
max_vel_x: 0.5
min_vel_x: 0.24
max_vel_theta: 0.5
min_vel_theta: -0.5
min_in_place_vel_theta: 0.25
holonomic_robot: true
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 0.25
latch_xy_goal_tolerance: true
# make sure that the minimum velocity multiplied by the sim_period is less than twice the tolerance on a goal. Otherwise, the robot will prefer to rotate in place just outside of range of its target position rather than moving towards the goal.
sim_time: 1.5 # set between 1 and 2. The higher he value, the smoother the path (though more samples would be required).
sim_granularity: 0.025
angular_sim_granularity: 0.05
vx_samples: 12
vtheta_samples: 20
meter_scoring: true
pdist_scale: 0.7 # The higher will follow more the global path.
gdist_scale: 0.8
occdist_scale: 0.01
publish_cost_grid_pc: false
#move_base
controller_frequency: 10.0 #The robot can move faster when higher.
#global planner
NavfnROS:
allow_unknown: true
visualize_potential: false
costmap_common_params.yaml
obstacle_range: 10
max_obstacle_height: 2.0
raytrace_range: 5.0
footprint: [[ 0.315, 0.4125], [-0.315, 0.32505], [-0.315, -0.32505], [ 0.3, -0.4125]]
footprint_padding: 0.03
#robot_radius: ir_of_robot
inflation_radius: 0.55
transform_tolerance: 2
controller_patience: 2.0
NavfnROS:
allow_unknown: true
recovery_behaviors: [
{name: conservative_clear, type: clear_costmap_recovery/ClearCostmapRecovery},
{name: aggressive_clear, type: clear_costmap_recovery/ClearCostmapRecovery}
]
conservative_clear:
reset_distance: 3.00
aggressive_clear:
reset_distance: 1.84
costmap_common_params_2d.yaml
footprint: [[ 0.315, 0.4125], [-0.315, 0.32505], [-0.315, -0.32505], [ 0.3, -0.4125]]
footprint_padding: 0.04
inflation_layer:
inflation_radius: 0.7 # 2xfootprint, it helps to keep the global planned path farther from obstacles
transform_tolerance: 2
obstacle_layer:
obstacle_range: 5.0
raytrace_range: 5.0
max_obstacle_height: 0.4
track_unknown_space: true
observation_sources: laser_scan_sensor point_cloud_sensorA
laser_scan_sensor: {
data_type: LaserScan,
topic: /scan,
expected_update_rate: 5.0,
marking: true,
clearing: true,
# observation_persistence: 0.0,
# min_obstacle_height: -0.10,
# max_obstacle_height: 2.0
}
point_cloud_sensorA: {
sensor_frame: zed_optical_frame,
data_type: PointCloud2,
topic: /camera/point_cloud/cloud,
expected_update_rate: 5.0,
marking: true,
clearing: true,
min_obstacle_height: -0.10,
max_obstacle_height: 2.0
}
global_costmap_params.yaml
#global_costmap
global_frame: map
robot_base_frame: base_link
update_frequency: 1
publish_frequency: 1
always_send_full_costmap: false
plugins:
- {name: static_layer, type: "rtabmap_ros::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
local_costmap_param.yaml
global_frame: odom
robot_base_frame: base_link
update_frequency: 2
publish_frequency: 1
rolling_window: true
width: 3.0
height: 3.0
resolution: 0.025
origin_x: 0
origin_y: 0
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
local_costmap_params_2d.yaml
global_frame: odom
robot_base_frame: base_link
update_frequency: 2.0
publish_frequency: 2.0
rolling_window: true
width: 5.0
height: 5.0
resolution: 0.025
origin_x: 0.0
origin_y: 0.0
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
obstacle_layer:
obstacle_range: 5.0
raytrace_range: 5.0
max_obstacle_height: 0.02
track_unknown_space: true
observation_sources: laser_scan_sensor point_cloud_sensorA
laser_scan_sensor: {
data_type: LaserScan,
topic: /scan,
expected_update_rate: 0.1,
marking: true,
clearing: true
}
point_cloud_sensorA: {
sensor_frame: zed_optical_frame,
data_type: PointCloud2,
topic: /camera/point_cloud/cloud,
expected_update_rate: 5.0,
marking: true,
clearing: true,
min_obstacle_height: -99999.0,
max_obstacle_height: 99999.
}
planner_launch file
<launch>
<group ns="planner">
<node pkg="move_base" type="move_base" respawn="true" name="move_base" output="screen">
<remap from="/ratabmap/odom" to="/planner/odom"/>
<remap from="scan" to="/base_scan"/>
<remap from="obstacles_cloud" to="/obstacles_cloud"/>
<remap from="ground_cloud" to="/ground_cloud"/>
<remap from="map" to="/map"/>
<remap from="move_base_simple/goal" to="/planner_goal"/>
<rosparam file="/home/cair/zed_ws/src/rtabmap_ros/launch/nav_config_2/costmap_common_params_2d.yaml" command="load" ns="global_costmap"/>
<rosparam file="/home/cair/zed_ws/src/rtabmap_ros/launch/nav_config_2/costmap_common_params_2d.yaml" command="load" ns="local_costmap" />
<rosparam file="/home/cair/zed_ws/src/rtabmap_ros/launch/nav_config_2/local_costmap_params.yaml" command="load" ns="local_costmap" />
<rosparam file="/home/cair/zed_ws/src/rtabmap_ros/launch/nav_config_2/global_costmap_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="/home/cair/zed_ws/src/rtabmap_ros/launch/nav_config_2/base_local_planner_params.yaml" command="load" />
</node>
</group>
<group ns="camera">
<node pkg="nodelet" type="nodelet" name="data_throttle" args="load rtabmap_ros/data_throttle camera_nodelet_manager">
<remap from="rgb/image_in" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image_in" to="/camera/depth/image_rect_color"/>
<remap from="rgb/camera_info_in" to="/camera/rgb/camera_info"/>
<remap from="rgb/image_out" to="data_resized_image"/>
<remap from="depth/image_out" to="data_resized_image_depth"/>
<remap from="rgb/camera_info_out" to="data_resized_camera_info"/>
</node>
<node pkg="nodelet" type="nodelet" name="points_xyz_planner" args="load rtabmap_ros/point_cloud_xyz camera_nodelet_manager">
<remap from="depth/image" to="data_resized_image_depth"/>
<remap from="depth/camera_info" to="data_resized_camera_info"/>
<remap from="cloud" to="cloudXYZ" />
</node>
<node pkg="nodelet" type="nodelet" name="obstacles_detection" args="load rtabmap_ros/obstacles_detection camera_nodelet_manager">
<remap from="cloud" to="cloudXYZ"/>
<remap from="obstacles" to="/obstacles_cloud"/>
<remap from="ground" to="/ground_cloud"/>
</node>
</group>
</launch>
rtabmap ros file
<launch>
<arg name="stereo" default="false"/>
<arg name="rtabmapviz" default="true" />
<arg name="rviz" default="true" />
<arg name="localization" default="false"/>
<arg name="cfg" default="" />
<arg name="gui_cfg" default="~/.ros/rtabmap_gui.ini" />
<arg name="rviz_cfg" default="-d $(find rtabmap_ros)/launch/config/rgbd.rviz" />
<arg name="frame_id" default="base_link"/>
<arg name="namespace" default="rtabmap"/>
<arg name="database_path" default="~/.ros/rtabmap.db"/>
<arg name="queue_size" default="20"/>
<arg name="wait_for_transform" default="2.0"/>
<arg name="rtabmap_args" default="delete_db_on_start"/>
<arg name="launch_prefix" default=""/>
<arg name="approx_sync" default="true"/>
<arg name="rgb_topic" default="/camera/rgb/image_rect_color" />
<arg name="depth_topic" default="/camera/depth/image_rect_color" />
<arg name="camera_info_topic" default="/camera/rgb/camera_info" />
<arg name="rgb_image_transport" default="compressed"/>
<arg name="subscribe_scan" default="false"/>
<arg name="scan_topic" default="/base_scan"/>
<arg name="subscribe_scan_cloud" default="false"/>
<arg name="scan_cloud_topic" default="/scan_cloud"/>
<arg name="visual_odometry" default="true"/>
<arg name="odom_topic" default="/odom"/>
<arg name="odom_frame_id" default=""/>
<arg name="odom_args" default="$(arg rtabmap_args)"/>
<group ns="$(arg namespace)">
<group>
<node if="$(arg visual_odometry)" pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="screen" args="$(arg odom_args)" launch-prefix="$(arg launch_prefix)">
<remap from="rgb/image" to="$(arg rgb_topic)"/>
<remap from="depth/image" to="$(arg depth_topic)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
</node>
</group>
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="$(arg rtabmap_args)" launch-prefix="$(arg launch_prefix)">
<remap from="rgb/image" to="$(arg rgb_topic)"/>
<remap from="depth/image" to="$(arg depth_topic)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
<remap from="goal_out" to="current_goal"/>
<remap from="move_base" to="/planner/move_base"/>
<remap from="grid_map" to="/map"/>
<remap from="scan_cloud" to="$(arg scan_cloud_topic)"/>
<remap unless="$(arg visual_odometry)" from="odom" to="$(arg odom_topic)"/>
</node>
</group>
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="$(arg rviz_cfg)"/>
<node if="$(arg rviz)" pkg="nodelet" type="nodelet" name="points_xyzrgb" args="standalone rtabmap_ros/point_cloud_xyzrgb">
<remap from="rgb/image" to="$(arg rgb_topic)"/>
<remap from="depth/image" to="$(arg depth_topic)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
<remap from="cloud" to="voxel_cloud" />
</node>
</launch>
error while launching navigation
/camera/data_throttle/decimation: 2
* /camera/data_throttle/rate: 5.0
* /camera/obstacles_detection/frame_id: base_link
* /camera/obstacles_detection/map_frame_id: map
* /camera/obstacles_detection/max_obstacles_height: 0.4
* /camera/obstacles_detection/min_cluster_size: 20
* /camera/obstacles_detection/wait_for_transform: True
* /camera/points_xyz_planner/decimation: 1
* /camera/points_xyz_planner/max_depth: 3.0
* /camera/points_xyz_planner/voxel_size: 0.02
* /planner/cmd_vel/abtr_priority: 10
* /planner/move_base/NavfnROS/allow_unknown: True
* /planner/move_base/NavfnROS/visualize_potential: False
* /planner/move_base/TrajectoryPlannerROS/acc_lim_theta: 4
* /planner/move_base/TrajectoryPlannerROS/acc_lim_x: 0.75
* /planner/move_base/TrajectoryPlannerROS/acc_lim_y: 0.75
* /planner/move_base/TrajectoryPlannerROS/angular_sim_granularity: 0.05
* /planner/move_base/TrajectoryPlannerROS/gdist_scale: 0.8
* /planner/move_base/TrajectoryPlannerROS/holonomic_robot: True
* /planner/move_base/TrajectoryPlannerROS/latch_xy_goal_tolerance: True
* /planner/move_base/TrajectoryPlannerROS/max_vel_theta: 0.5
* /planner/move_base/TrajectoryPlannerROS/max_vel_x: 0.5
* /planner/move_base/TrajectoryPlannerROS/meter_scoring: True
* /planner/move_base/TrajectoryPlannerROS/min_in_place_vel_theta: 0.25
* /planner/move_base/TrajectoryPlannerROS/min_vel_theta: -0.5
* /planner/move_base/TrajectoryPlannerROS/min_vel_x: 0.24
* /planner/move_base/TrajectoryPlannerROS/occdist_scale: 0.01
* /planner/move_base/TrajectoryPlannerROS/pdist_scale: 0.7
* /planner/move_base/TrajectoryPlannerROS/publish_cost_grid_pc: False
* /planner/move_base/TrajectoryPlannerROS/sim_granularity: 0.025
* /planner/move_base/TrajectoryPlannerROS/sim_time: 1.5
* /planner/move_base/TrajectoryPlannerROS/vtheta_samples: 20
* /planner/move_base/TrajectoryPlannerROS/vx_samples: 12
* /planner/move_base/TrajectoryPlannerROS/xy_goal_tolerance: 0.25
* /planner/move_base/TrajectoryPlannerROS/yaw_goal_tolerance: 0.25
* /planner/move_base/base_global_planner: navfn/NavfnROS
* /planner/move_base/controller_frequency: 10.0
* /planner/move_base/global_costmap/always_send_full_costmap: False
* /planner/move_base/global_costmap/footprint: [[0.315, 0.4125],...
* /planner/move_base/global_costmap/footprint_padding: 0.04
* /planner/move_base/global_costmap/global_frame: map
* /planner/move_base/global_costmap/inflation_layer/inflation_radius: 0.7
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/clearing: True
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/data_type: LaserScan
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/expected_update_rate: 5.0
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/marking: True
* /planner/move_base/global_costmap/obstacle_layer/laser_scan_sensor/topic: /scan
* /planner/move_base/global_costmap/obstacle_layer/max_obstacle_height: 0.4
* /planner/move_base/global_costmap/obstacle_layer/observation_sources: laser_scan_sensor...
* /planner/move_base/global_costmap/obstacle_layer/obstacle_range: 5.0
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/clearing: True
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/data_type: PointCloud2
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/expected_update_rate: 5.0
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/marking: True
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/max_obstacle_height: 2.0
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/min_obstacle_height: -0.1
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/sensor_frame: zed_optical_frame
* /planner/move_base/global_costmap/obstacle_layer/point_cloud_sensorA/topic: /camera/point_clo...
* /planner/move_base/global_costmap/obstacle_layer/raytrace_range: 5.0
* /planner/move_base/global_costmap/obstacle_layer/track_unknown_space: True
* /planner/move_base/global_costmap/plugins: [{'type': 'rtabma...
* /planner/move_base/global_costmap/publish_frequency: 1
* /planner/move_base/global_costmap/robot_base_frame: base_link
* /planner/move_base/global_costmap/transform_tolerance: 2
* /planner/move_base/global_costmap/update_frequency: 1
* /planner/move_base/local_costmap/footprint: [[0.315, 0.4125],...
* /planner/move_base/local_costmap/footprint_padding: 0.04
* /planner/move_base/local_costmap/global_frame: odom
* /planner/move_base/local_costmap/height: 3.0
* /planner/move_base/local_costmap/inflation_layer/inflation_radius: 0.7
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/clearing: True
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/data_type: LaserScan
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/expected_update_rate: 5.0
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/marking: True
* /planner/move_base/local_costmap/obstacle_layer/laser_scan_sensor/topic: /scan
* /planner/move_base/local_costmap/obstacle_layer/max_obstacle_height: 0.4
* /planner/move_base/local_costmap/obstacle_layer/observation_sources: laser_scan_sensor...
* /planner/move_base/local_costmap/obstacle_layer/obstacle_range: 5.0
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/clearing: True
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/data_type: PointCloud2
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/expected_update_rate: 5.0
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/marking: True
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/max_obstacle_height: 2.0
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/min_obstacle_height: -0.1
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/sensor_frame: zed_optical_frame
* /planner/move_base/local_costmap/obstacle_layer/point_cloud_sensorA/topic: /camera/point_clo...
* /planner/move_base/local_costmap/obstacle_layer/raytrace_range: 5.0
* /planner/move_base/local_costmap/obstacle_layer/track_unknown_space: True
* /planner/move_base/local_costmap/origin_x: 0
* /planner/move_base/local_costmap/origin_y: 0
* /planner/move_base/local_costmap/plugins: [{'type': 'costma...
* /planner/move_base/local_costmap/publish_frequency: 1
* /planner/move_base/local_costmap/resolution: 0.025
* /planner/move_base/local_costmap/robot_base_frame: base_link
* /planner/move_base/local_costmap/rolling_window: True
* /planner/move_base/local_costmap/transform_tolerance: 2
* /planner/move_base/local_costmap/update_frequency: 2
* /planner/move_base/local_costmap/width: 3.0
* /rosdistro: indigo
* /rosversion: 1.11.20
NODES
/camera/
data_throttle (nodelet/nodelet)
obstacles_detection (nodelet/nodelet)
points_xyz_planner (nodelet/nodelet)
/planner/
move_base (move_base/move_base)
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[planner/move_base-1]: started with pid [29108]
process[camera/data_throttle-2]: started with pid [29109]
process[camera/points_xyz_planner-3]: started with pid [29110]
process[camera/obstacles_detection-4]: started with pid [29112]
[ INFO] [1476964977.905537558]: Using plugin "static_layer"
[ INFO] [1476964978.181519481]: Requesting the map...
[ INFO] [1476964978.387590702]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964978.486638496]: Received a 107 X 145 map at 0.050000 m/pix
[ INFO] [1476964978.495737293]: Using plugin "obstacle_layer"
[ INFO] [1476964978.555910524]: Subscribed to Topics: laser_scan_sensor point_cloud_sensorA
[ INFO] [1476964978.599178143]: Using plugin "inflation_layer"
[ INFO] [1476964978.706693874]: pluginlib WARNING: In file /tmp/binarydeb/ros-indigo-navfn-1.12.12/src/navfn_ros.cpp PLUGINLIB_DECLARE_CLASS is deprecated, please use PLUGINLIB_EXPORT_CLASS instead. You can run the script 'plugin_macro_update' provided with pluginlib in your package source folder to automatically and recursively update legacy macros. Base = base_class_type, Derived = derived_class_type
[ INFO] [1476964978.735726182]: Using plugin "obstacle_layer"
[ INFO] [1476964978.810067571]: Subscribed to Topics: laser_scan_sensor point_cloud_sensorA
[ INFO] [1476964978.869518219]: Using plugin "inflation_layer"
[ INFO] [1476964978.988422221]: Created local_planner base_local_planner/TrajectoryPlannerROS
[ INFO] [1476964979.001261247]: Sim period is set to 0.10
[ INFO] [1476964979.991212399]: pluginlib WARNING: In file /tmp/binarydeb/ros-indigo-clear-costmap-recovery-1.12.12/src/clear_costmap_recovery.cpp PLUGINLIB_DECLARE_CLASS is deprecated, please use PLUGINLIB_EXPORT_CLASS instead. You can run the script 'plugin_macro_update' provided with pluginlib in your package source folder to automatically and recursively update legacy macros. Base = base_class_type, Derived = derived_class_type
[ INFO] [1476964979.994665380]: Recovery behavior will clear layer obstacles
[ INFO] [1476964980.051337114]: pluginlib WARNING: In file /tmp/binarydeb/ros-indigo-rotate-recovery-1.12.12/src/rotate_recovery.cpp PLUGINLIB_DECLARE_CLASS is deprecated, please use PLUGINLIB_EXPORT_CLASS instead. You can run the script 'plugin_macro_update' provided with pluginlib in your package source folder to automatically and recursively update legacy macros. Base = base_class_type, Derived = derived_class_type
[ INFO] [1476964980.061984842]: Recovery behavior will clear layer obstacles
[ INFO] [1476964980.092542546]: Resizing costmap to 107 X 147 at 0.050000 m/pix
[ INFO] [1476964980.919452250]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964982.024934940]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964983.012641040]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964983.984434549]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476964985.031318891]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964986.067769286]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964987.176541154]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964988.284935377]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964989.290634837]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476964990.242850059]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964991.394449335]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476964992.332081949]: Resizing costmap to 107 X 147 at 0.050000 m/pix
[ INFO] [1476964993.393790149]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964994.482335182]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964995.480345235]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964996.527608326]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964997.544350962]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964998.670003063]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476964999.695018262]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965000.739881147]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965001.804525224]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965002.754938408]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965003.830864638]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965004.793107210]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965005.884564684]: Resizing costmap to 107 X 147 at 0.050000 m/pix
[ INFO] [1476965006.908325272]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965007.908508296]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965008.985224217]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965010.081895892]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965011.077050379]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965012.190715975]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965013.308658571]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965014.404737725]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965015.475315963]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965016.448837499]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965017.451843079]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ INFO] [1476965018.539765686]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ WARN] [1476965018.674021099]: Illegal bounds change, was [tl: (-0.478373, -3.318025), br: (4.871627, 3.931975)], but is now [tl: (-0.501825, -1.988850), br: (4.846004, 3.876735)]. The offending layer is global_costmap/obstacle_layer
[ INFO] [1476965019.507384363]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965020.550296630]: Resizing costmap to 107 X 147 at 0.050000 m/pix
[ WARN] [1476965020.650598350]: Illegal bounds change, was [tl: (-0.478516, -3.435339), br: (4.871484, 3.914661)], but is now [tl: (-0.496089, -1.997612), br: (4.845046, 3.868937)]. The offending layer is global_costmap/obstacle_layer
[ INFO] [1476965021.584950000]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ WARN] [1476965021.683805419]: Illegal bounds change, was [tl: (-0.477935, -3.382375), br: (4.872065, 3.917625)], but is now [tl: (-0.492186, -2.201555), br: (4.847005, 3.866617)]. The offending layer is global_costmap/obstacle_layer
[ INFO] [1476965022.607655292]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ WARN] [1476965022.698249213]: Illegal bounds change, was [tl: (-0.478719, -3.380401), br: (4.871281, 3.919599)], but is now [tl: (-0.486803, -3.102980), br: (4.846062, 3.860420)]. The offending layer is global_costmap/obstacle_layer
[ INFO] [1476965023.681956359]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965024.657954606]: Resizing costmap to 107 X 146 at 0.050000 m/pix
[ INFO] [1476965025.663194502]: Resizing costmap to 107 X 145 at 0.050000 m/pix
[ WARN] [1476965025.751626562]: InflationLayer::updateCosts(): seen_ array size is wrong
my rqt graph
thanks
| Free forum by Nabble | Edit this page |