Re: RGBD+2D lidar, same lanuch file, different view_frames results
Posted by You Li on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGBD-2D-lidar-same-lanuch-file-different-view-frames-results-tp2152p2160.html
Here is the result using the following .launch file:
demo_hector_mapping_v2.launch
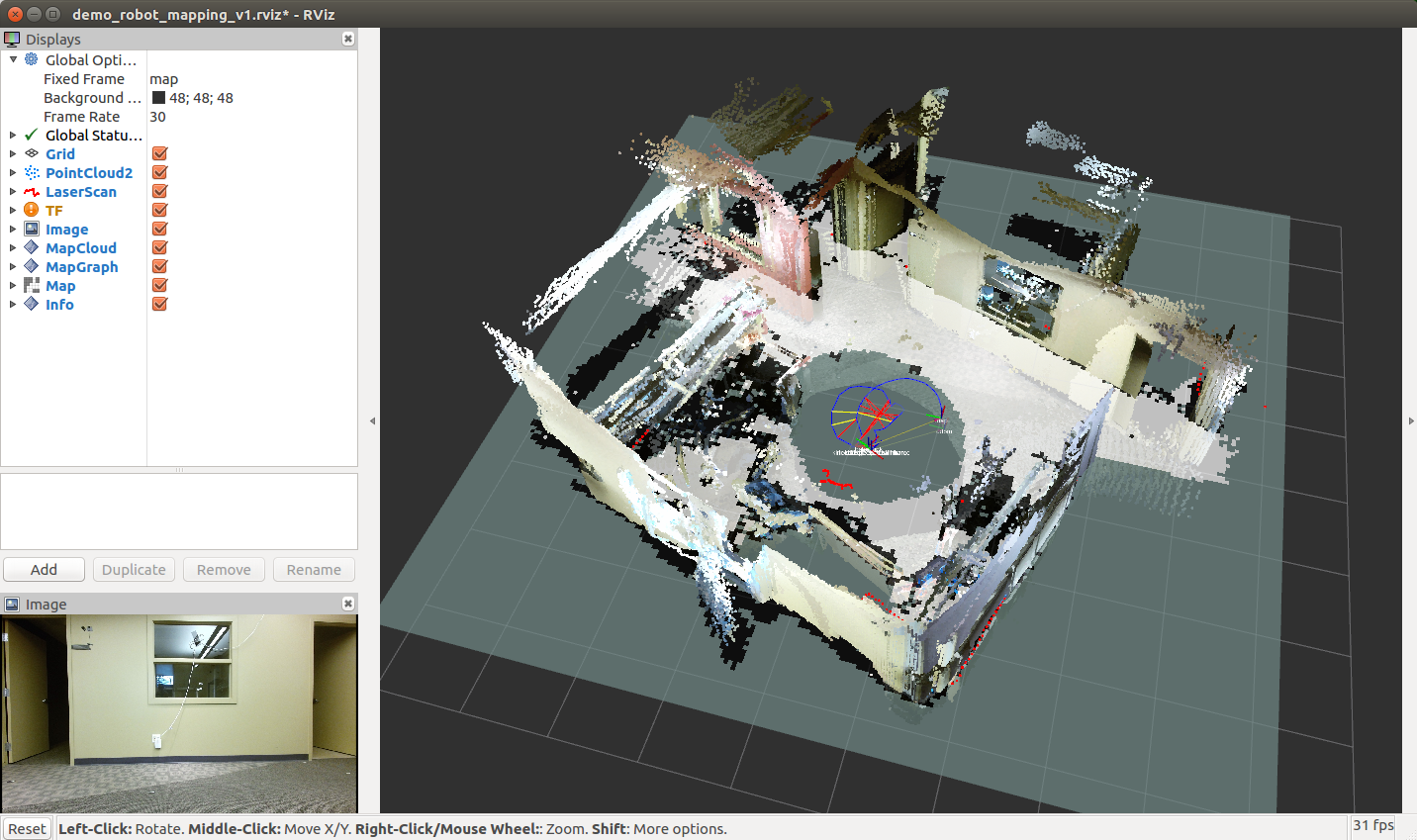
I am sure the Hector_slam algorithm can work on my laptop. However, probably the solution form Hector_slam were not used in this data processing, as if I blocked the Lidar data, the mapping result (with only Kinect v2) would be the same. Why did this happen? I guess it is because of the frames?
Here are some warnings about my frames:
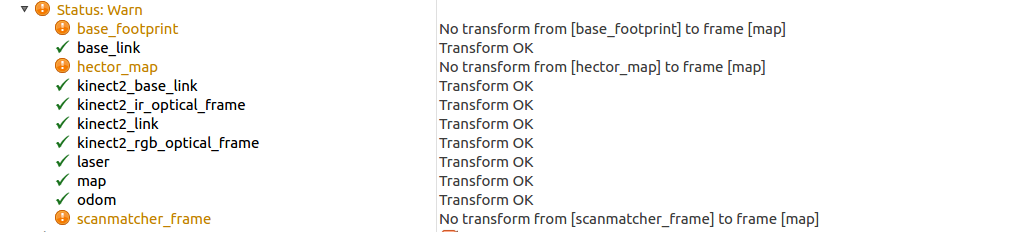
Here is the view of my frames:
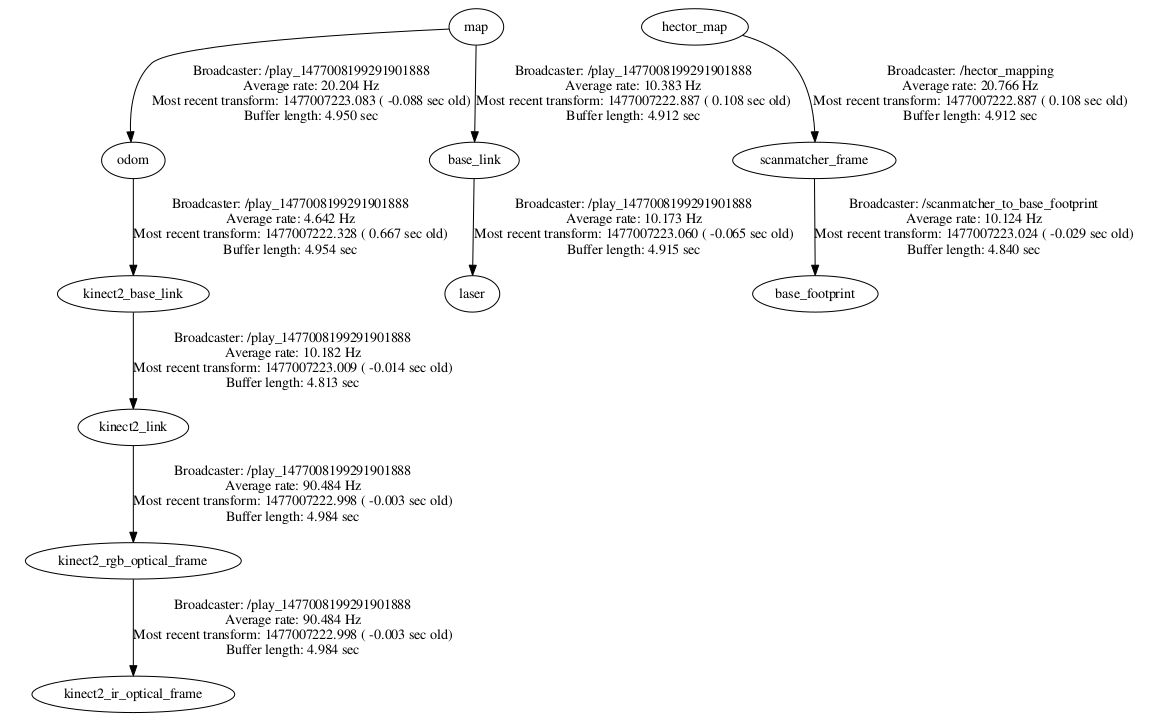
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGBD-2D-lidar-same-lanuch-file-different-view-frames-results-tp2152p2160.html
Here is the result using the following .launch file:
demo_hector_mapping_v2.launch
I am sure the Hector_slam algorithm can work on my laptop. However, probably the solution form Hector_slam were not used in this data processing, as if I blocked the Lidar data, the mapping result (with only Kinect v2) would be the same. Why did this happen? I guess it is because of the frames?
Here are some warnings about my frames:
Here is the view of my frames:
| Free forum by Nabble | Edit this page |