Re: RGBD+2D lidar, same lanuch file, different view_frames results
Posted by You Li on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGBD-2D-lidar-same-lanuch-file-different-view-frames-results-tp2152p2162.html
Hi,
I have modified my launch file, to the follows:
demo_hector_mapping_v4.launch
demo_robot_mapping_v1.rviz
and now the frames are
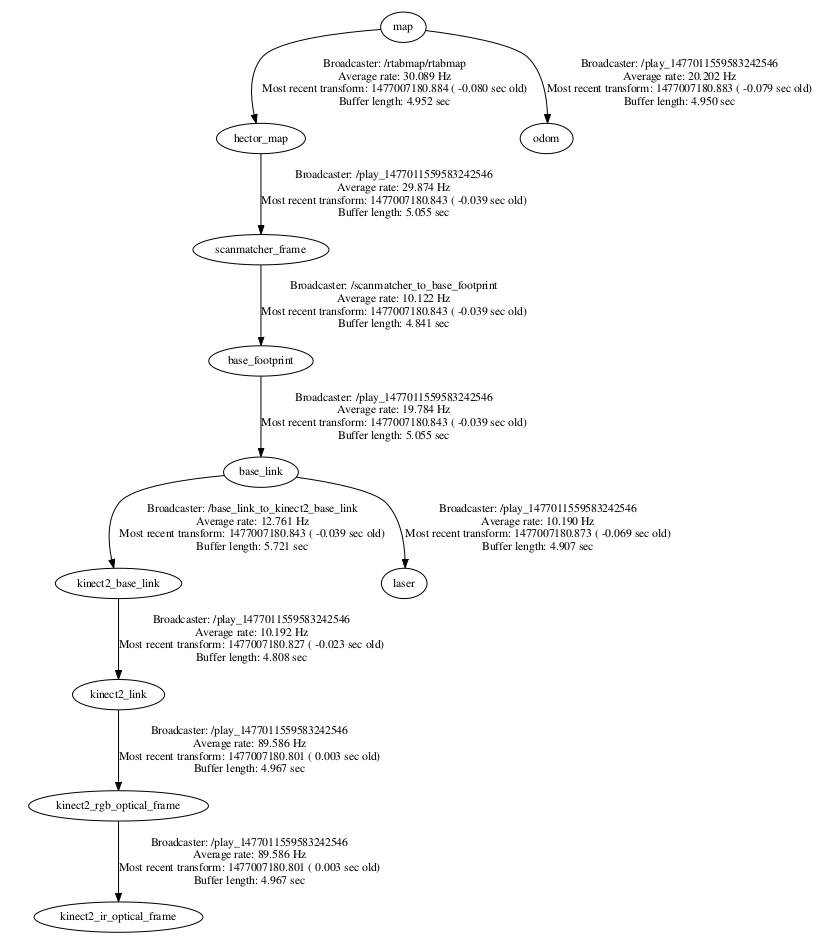
Seems makes more sense?
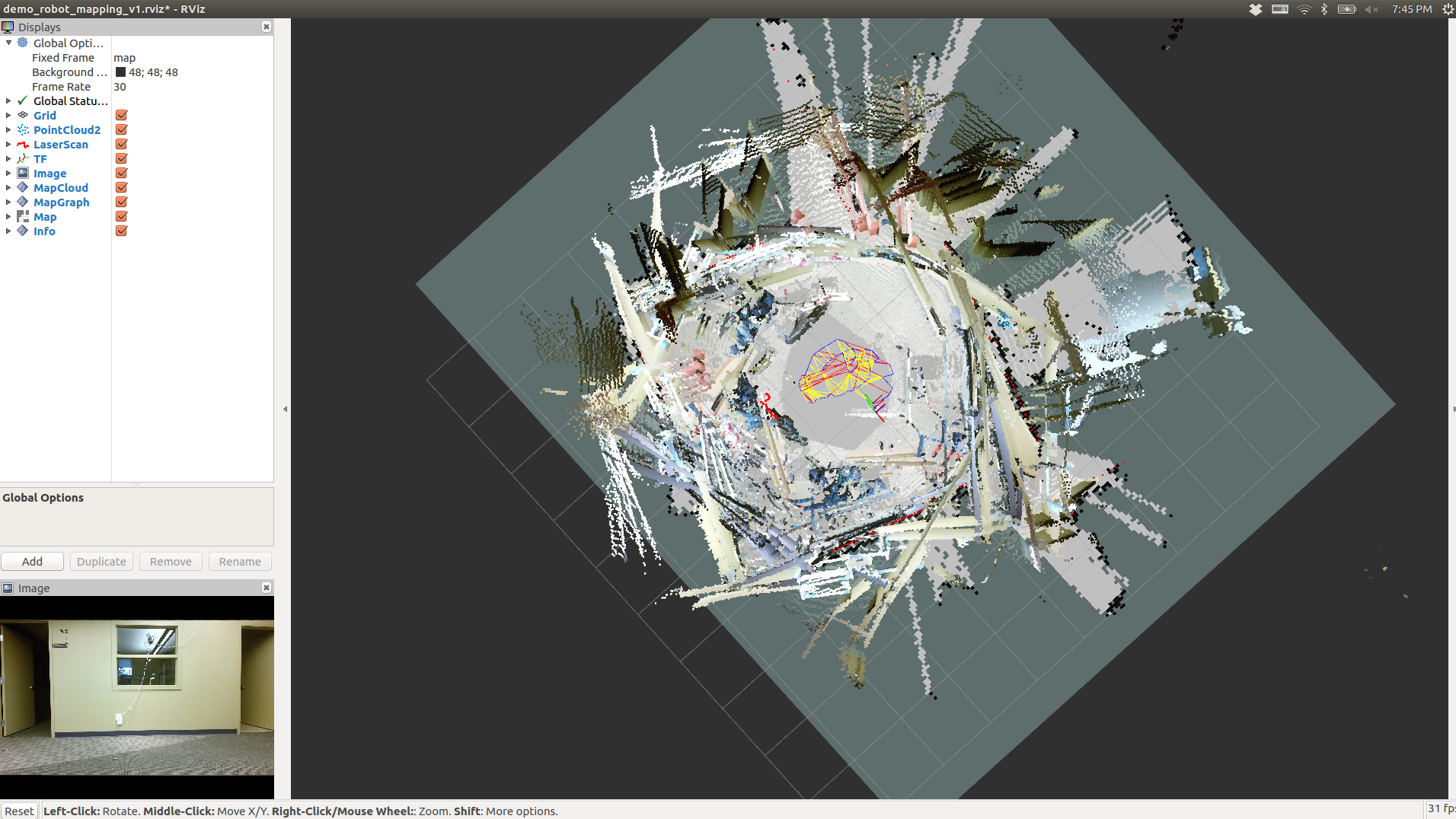
However, the mapping result was not good.
Here is a video of data processing:
https://www.dropbox.com/s/exeb4j0xpv2muyn/25.ogv?dl=0
and here is my data:
https://www.dropbox.com/s/zlcoh7r2gvevzz0/slam_025.bag.tar.gz?dl=0
If you would not like to download the video, here is a figure,
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGBD-2D-lidar-same-lanuch-file-different-view-frames-results-tp2152p2162.html
Hi,
I have modified my launch file, to the follows:
demo_hector_mapping_v4.launch
demo_robot_mapping_v1.rviz
and now the frames are
Seems makes more sense?
However, the mapping result was not good.
Here is a video of data processing:
https://www.dropbox.com/s/exeb4j0xpv2muyn/25.ogv?dl=0
and here is my data:
https://www.dropbox.com/s/zlcoh7r2gvevzz0/slam_025.bag.tar.gz?dl=0
If you would not like to download the video, here is a figure,
| Free forum by Nabble | Edit this page |