Re: RGB-D Mapping with Laser scanner
Posted by You Li on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-Mapping-with-Laser-scanner-tp25p2167.html
Hi,
Thanks for the instructions. I followed the information, but still got the problem when using Kinect v2 and rplidar A2. Neither rviz or rtabmaprviz did not provide the mapping results. Here is what I did:
1. Run my lidar by using $ roslaunch rplidar_ros rplidar.launch
2. Open another terminal and run $ roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true
3. Open another terminal and run $ roslaunch rtabmap_ros demo_hector_mapping_v2.launch resolution:=hd
Here are my .launch files:
demo_hector_mapping_v2.launch
demo_robot_mapping_v1.rviz
Here is my rqt graph:
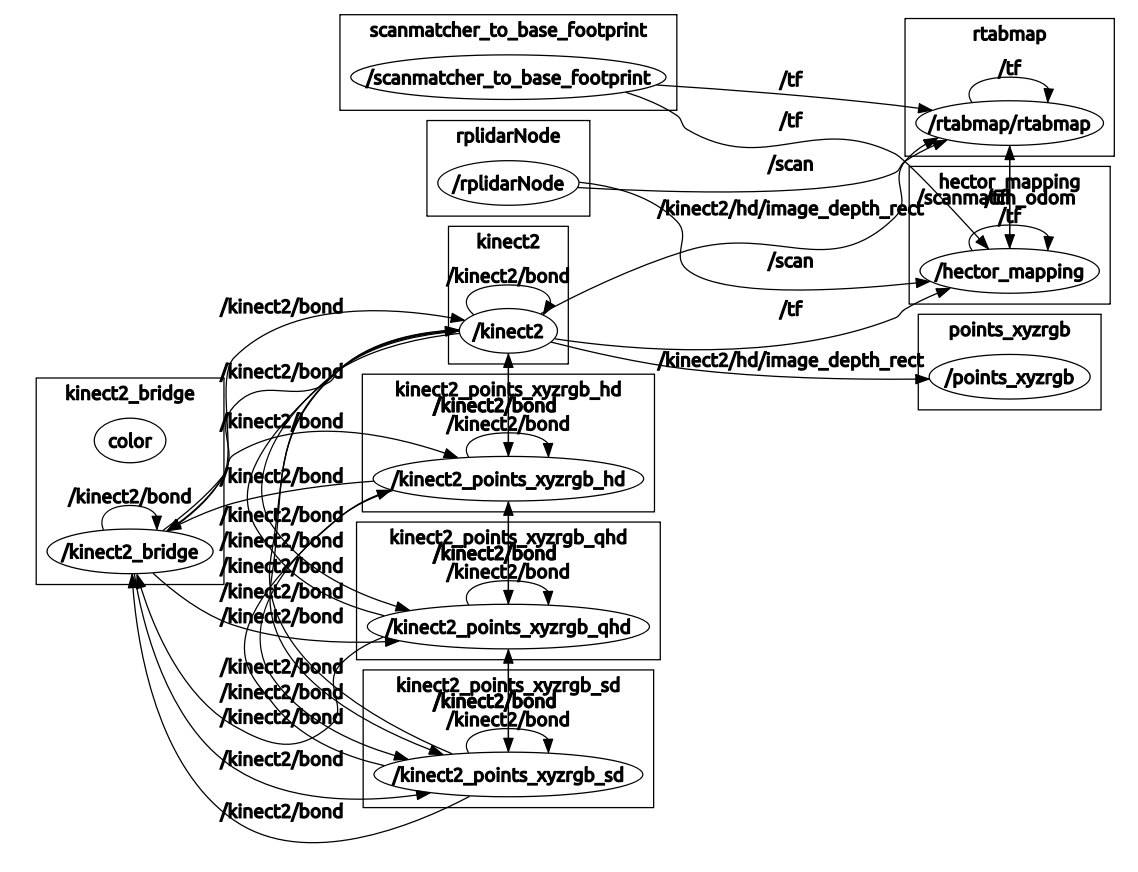
And here is the frames:

Do you have any suggestions?
Many thanks,
You Li
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-Mapping-with-Laser-scanner-tp25p2167.html
Hi,
Thanks for the instructions. I followed the information, but still got the problem when using Kinect v2 and rplidar A2. Neither rviz or rtabmaprviz did not provide the mapping results. Here is what I did:
1. Run my lidar by using $ roslaunch rplidar_ros rplidar.launch
2. Open another terminal and run $ roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true
3. Open another terminal and run $ roslaunch rtabmap_ros demo_hector_mapping_v2.launch resolution:=hd
Here are my .launch files:
demo_hector_mapping_v2.launch
demo_robot_mapping_v1.rviz
Here is my rqt graph:
And here is the frames:
Do you have any suggestions?
Many thanks,
You Li
| Free forum by Nabble | Edit this page |