Re: RTABMAP unable to detect loop closure for corridors
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTABMAP-unable-to-detect-loop-closure-for-corridors-tp2291p2321.html
Hi,
I've found the problem. Set "Reg/Strategy" to 1 instead of 2. If you look at the latest demo_robot_mapping.launch:
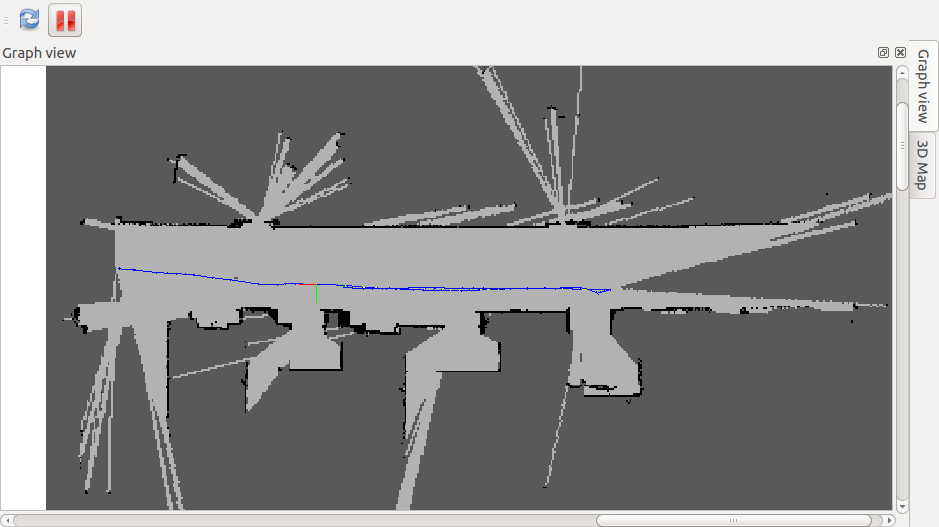
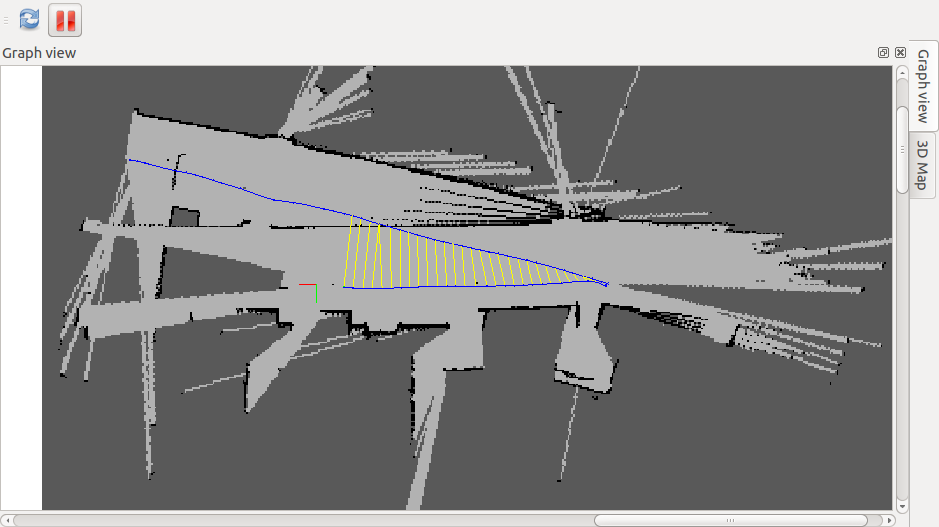
You can also try to calibrate better the odometry of the robot, as it drifts quite fast on rotation. Here is an example where the robot rotates 180 degrees and traverses the same path:
Map with ICP refning
Map without ICP refining (raw odometry)
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTABMAP-unable-to-detect-loop-closure-for-corridors-tp2291p2321.html
Hi,
I've found the problem. Set "Reg/Strategy" to 1 instead of 2. If you look at the latest demo_robot_mapping.launch:
<param name="Reg/Strategy" type="string" value="1"/> <!-- 0=Visual, 1=ICP, 2=Visual+ICP -->When having external odometry and a LIDAR, I recommend to use Reg/Strategy to 1.
You can also try to calibrate better the odometry of the robot, as it drifts quite fast on rotation. Here is an example where the robot rotates 180 degrees and traverses the same path:
Map with ICP refning
Map without ICP refining (raw odometry)
cheers,
Mathieu
| Free forum by Nabble | Edit this page |