Re: rtabmap_ros issue (red screen)
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-issue-tp238p239.html
For more information about red screens, visit this page.
Example here:
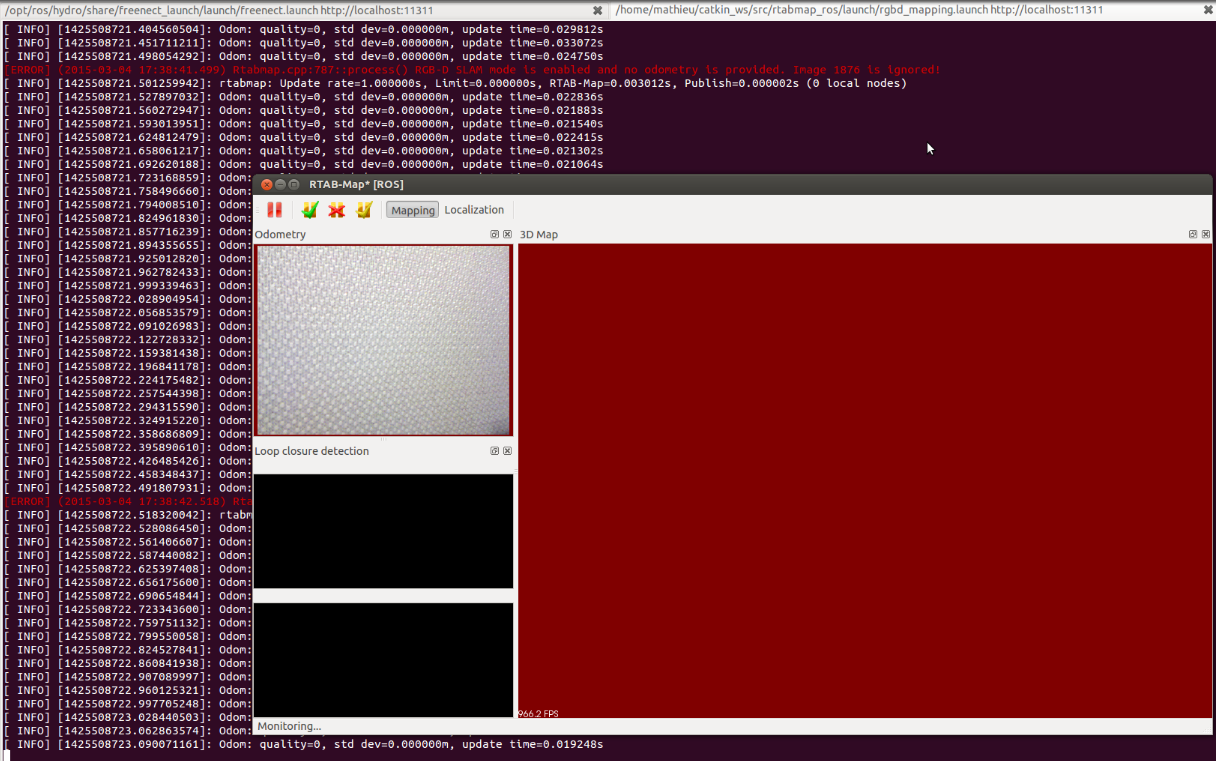
I can reproduce a starting red screen by pointing the camera on the wall where there are no features to track:
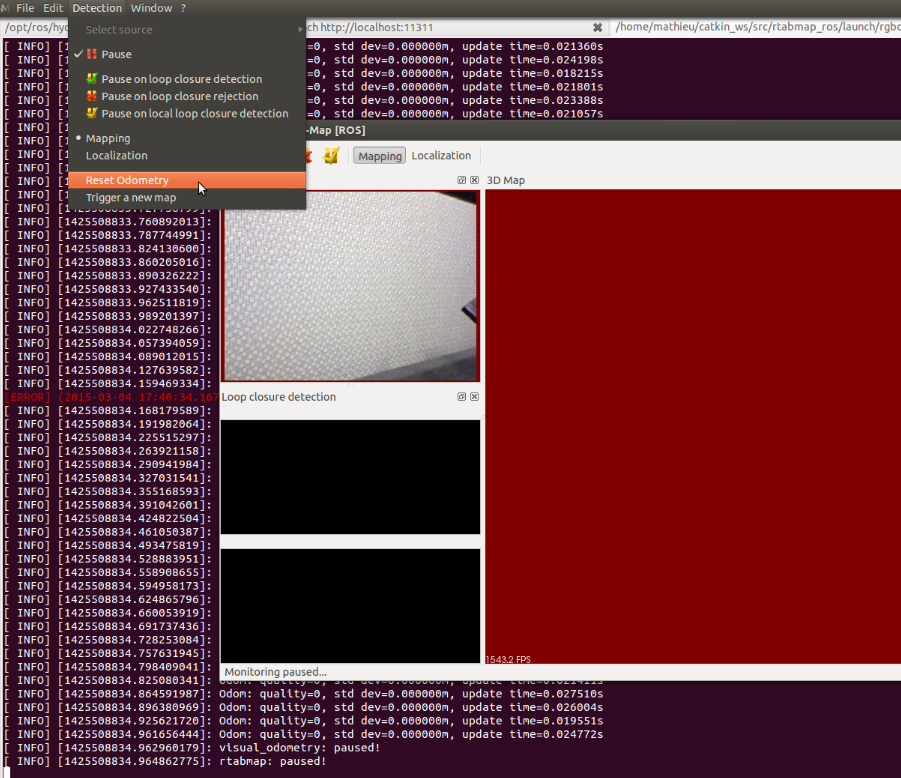
To recover, I clicked "Pause" button on the interface. In the Detection menu, click on "Reset Odometry". Point the camera to an area with visual features, then click "Continue".
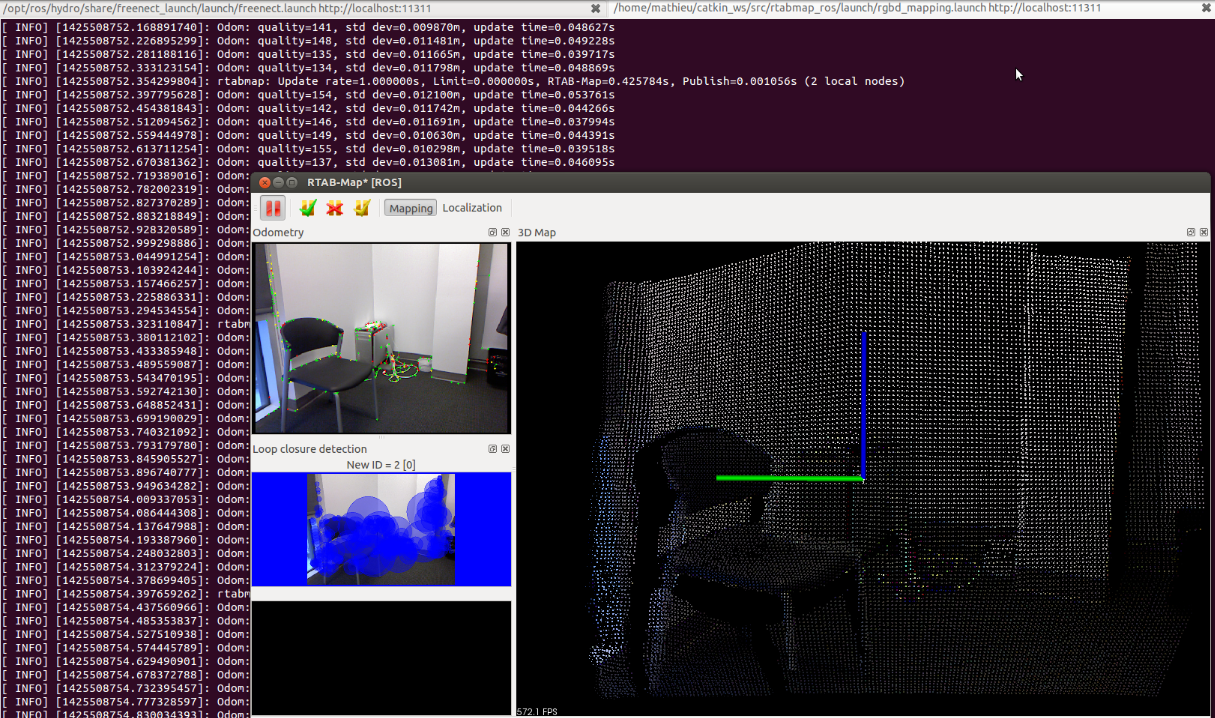
Note that with the Odometry view (Window menu -> Show view), you can view the actual image used for odometry with features tracked (inliers=green, outliers=red).
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-issue-tp238p239.html
For more information about red screens, visit this page.
Example here:
$ roslaunch freenect_launch freenect.launch depth_registration:=true $ roslaunch rtabmap_ros rgbd_mapping.launch
I can reproduce a starting red screen by pointing the camera on the wall where there are no features to track:
To recover, I clicked "Pause" button on the interface. In the Detection menu, click on "Reset Odometry". Point the camera to an area with visual features, then click "Continue".
Note that with the Odometry view (Window menu -> Show view), you can view the actual image used for odometry with features tracked (inliers=green, outliers=red).
| Free forum by Nabble | Edit this page |