Re: Help with find_object_3d settings / usage
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Help-with-find-object-3d-settings-usage-tp2499p2514.html
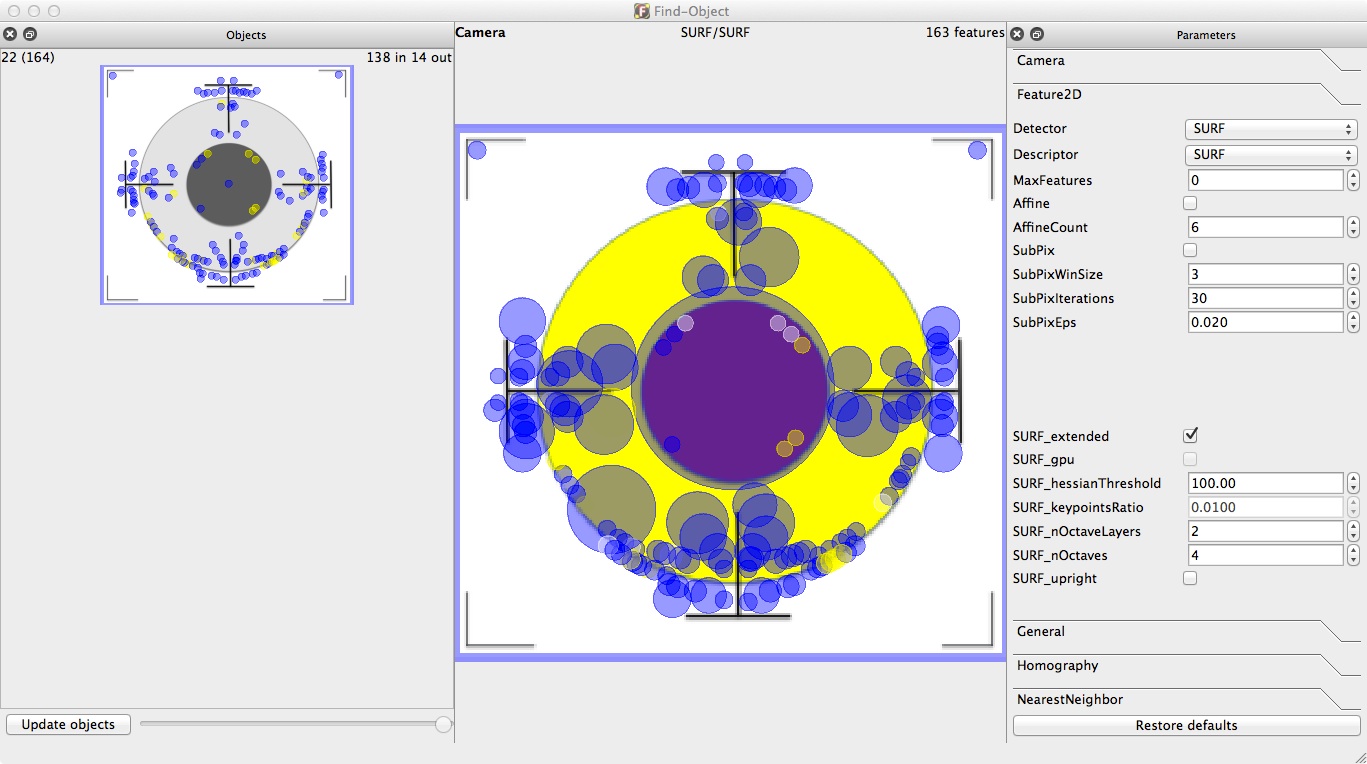
Is your find_object_2d built with OpenCV nonfree module? You can know that if SIFT and SURF features are available in find_object_2d settings under panel Parameters->Feature2D->Detector. SIFT/SURF features are more scale/rotation invariant than other kind of features. If using SURF, you can increase the number of features extracted by lowering "SURF_hessianThreshold".
Also, to find this symbol, it may be better to re-take a picture with the Kinect v2 of this object after being printed. You can also add this object multiple time at different scales.
Note also that a symmetric symbol can be a poor choice for features matching. The best is to have an asymmetric symbol (maybe the 4 quadrants are different, to be able to know the rotation of the target).
cheers
URL: http://official-rtab-map-forum.206.s1.nabble.com/Help-with-find-object-3d-settings-usage-tp2499p2514.html
Is your find_object_2d built with OpenCV nonfree module? You can know that if SIFT and SURF features are available in find_object_2d settings under panel Parameters->Feature2D->Detector. SIFT/SURF features are more scale/rotation invariant than other kind of features. If using SURF, you can increase the number of features extracted by lowering "SURF_hessianThreshold".
Also, to find this symbol, it may be better to re-take a picture with the Kinect v2 of this object after being printed. You can also add this object multiple time at different scales.
Note also that a symmetric symbol can be a poor choice for features matching. The best is to have an asymmetric symbol (maybe the 4 quadrants are different, to be able to know the rotation of the target).
cheers
| Free forum by Nabble | Edit this page |