Re: Open the existing database and continuously scan the room.
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Open-the-existing-database-and-continuously-scan-the-room-tp2485p2515.html
Hi Suzy,
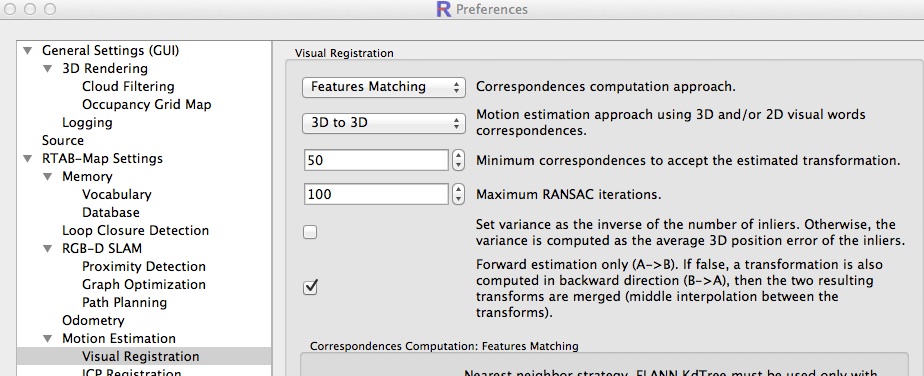
The curved shape of the scanned map is caused by odometry drift. To reduce odometry drift, scan slowly and avoid scanning areas where there are no visual features (e.g., only a white wall in camera field of view). These areas can cause big drifts that are difficult to correct even when there are loop closures. You can increase the minimum required features for transformation computation so scanning will stop tracking when you reach a featureless areas, forcing you to go back and try to scan differently (to have more visual features).
The curved shape of a map can be also caused by poor camera calibration, often seen with stereo cameras. This may not be your problem with the Kinect v2.
We cannot ensure that a rectangular room would be rectangular.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Open-the-existing-database-and-continuously-scan-the-room-tp2485p2515.html
Hi Suzy,
The curved shape of the scanned map is caused by odometry drift. To reduce odometry drift, scan slowly and avoid scanning areas where there are no visual features (e.g., only a white wall in camera field of view). These areas can cause big drifts that are difficult to correct even when there are loop closures. You can increase the minimum required features for transformation computation so scanning will stop tracking when you reach a featureless areas, forcing you to go back and try to scan differently (to have more visual features).
The curved shape of a map can be also caused by poor camera calibration, often seen with stereo cameras. This may not be your problem with the Kinect v2.
We cannot ensure that a rectangular room would be rectangular.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |