Re: rosbag rtabmap_ros
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rosbag-rtabmap-ros-tp248p252.html
Hello Micke,
I assume that you are based on the rgbdslam_datasets.launch file used in this post. This launch file is configured with the frame names included in the /tf recorded in the dataset bags:
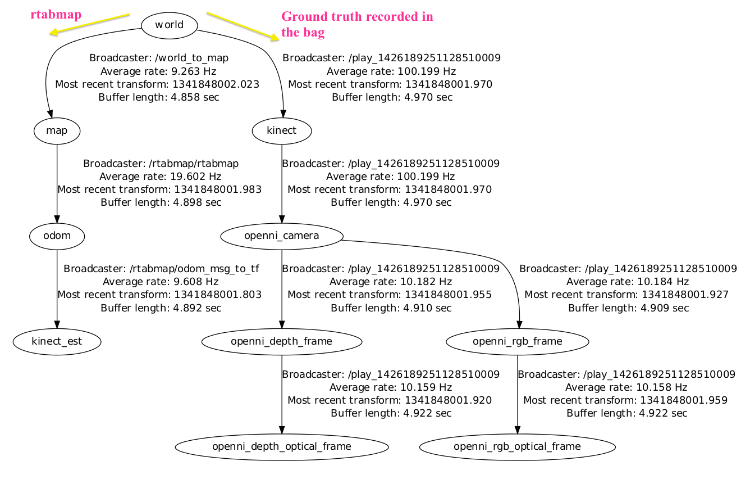
The goal of this launch file is to be able to compare /world->/kinect (ground truth) and /world->/kinect_est (rtabmap) transformations. Example:
In your case, if you have recorded only images/tf from openni_launch, you may have something like this in your bag:
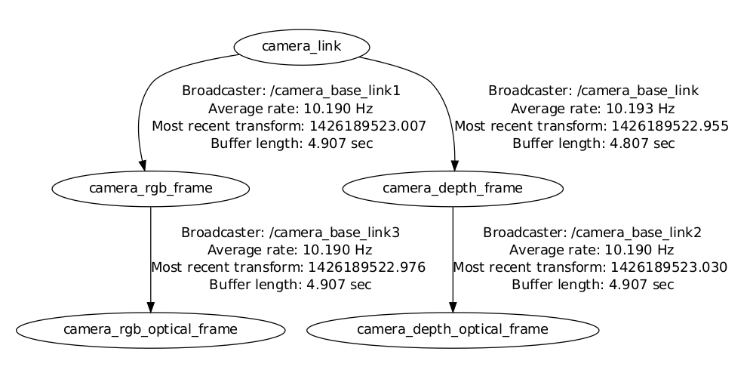
Inspired from rgbdslam_datasets.launch without the "ground_truth_frame_id" parameter set (your world to camera_link error), "frame_id"="camera_link" and "publish_tf"="true":
URL: http://official-rtab-map-forum.206.s1.nabble.com/rosbag-rtabmap-ros-tp248p252.html
Hello Micke,
I assume that you are based on the rgbdslam_datasets.launch file used in this post. This launch file is configured with the frame names included in the /tf recorded in the dataset bags:
The goal of this launch file is to be able to compare /world->/kinect (ground truth) and /world->/kinect_est (rtabmap) transformations. Example:
In your case, if you have recorded only images/tf from openni_launch, you may have something like this in your bag:
Inspired from rgbdslam_datasets.launch without the "ground_truth_frame_id" parameter set (your world to camera_link error), "frame_id"="camera_link" and "publish_tf"="true":
<group ns="rtabmap">
<!-- Odometry -->
<node pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="screen">
<remap from="rgb/image" to="/camera/rgb/image_color"/>
<remap from="depth/image" to="/camera/depth/image"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<param name="frame_id" type="string" value="camera_link"/>
<param name="publish_tf" type="bool" value="true"/>
<param name="wait_for_transform" type="bool" value="true"/>
</node>
<!-- Visual SLAM -->
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="subscribe_depth" type="bool" value="true"/>
<param name="frame_id" type="string" value="camera_link"/>
<remap from="rgb/image" to="/camera/rgb/image_color"/>
<remap from="depth/image" to="/camera/depth/image"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="odom" to="odom"/>
<param name="LccBow/MinInliers" type="string" value="10"/>
<param name="LccBow/InlierDistance" type="string" value="0.05"/>
</node>
</group>
| Free forum by Nabble | Edit this page |