Re: rosbag rtabmap_ros
Posted by Micke on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rosbag-rtabmap-ros-tp248p253.html
Hello Mathieu,
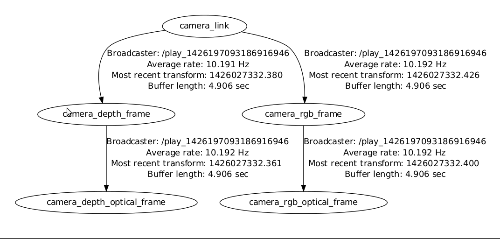
tf view_frames looks this way when I just run my rosbag:
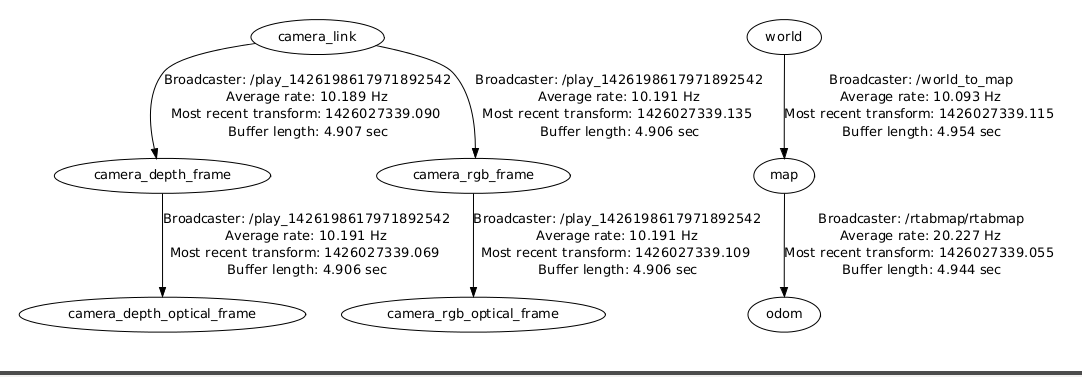
And when I run my rosbag with rgbdslam_datasets.launch (modified as you just told me):
I got this error from the console:
[ WARN] [1426199432.617938416, 1426027325.530611165]: Input depth type is 32FC1, please use type 16UC1 for depth. The depth images will be processed anyway but with a conversion. This warning is only be printed once...
[ WARN] [1426199433.619656476, 1426027326.537271214]: Could not get transform from world to camera_link after 1 second!
Current launch file:
So I can't get in RVIZ tf and voxel_cloud.
What TFs do you record? What are minimal topics to get rtabmap_ros working from a rosbag file ?
Thanks in advance,
Micke
URL: http://official-rtab-map-forum.206.s1.nabble.com/rosbag-rtabmap-ros-tp248p253.html
Hello Mathieu,
tf view_frames looks this way when I just run my rosbag:
And when I run my rosbag with rgbdslam_datasets.launch (modified as you just told me):
I got this error from the console:
[ WARN] [1426199432.617938416, 1426027325.530611165]: Input depth type is 32FC1, please use type 16UC1 for depth. The depth images will be processed anyway but with a conversion. This warning is only be printed once...
[ WARN] [1426199433.619656476, 1426027326.537271214]: Could not get transform from world to camera_link after 1 second!
Current launch file:
<launch>
<param name="use_sim_time" type="bool" value="true"/>
<arg name="strategy" default="0" />
<arg name="feature" default="6" />
<arg name="nn" default="3" />
<arg name="local_map" default="1000" />
<!-- Choose visualization -->
<arg name="rviz" default="true" />
<arg name="rtabmapviz" default="false" />
<!-- TF FRAMES -->
<node pkg="tf" type="static_transform_publisher" name="world_to_map"
args="0.0 0.0 0.0 0.0 0.0 0.0 /world /map 100" />
<group ns="rtabmap">
<!-- Odometry -->
<node pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="screen">
<remap from="rgb/image" to="/camera/rgb/image_color"/>
<remap from="depth/image" to="/camera/depth/image"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<param name="Odom/Strategy" type="string" value="$(arg strategy)"/>
<param name="Odom/FeatureType" type="string" value="$(arg feature)"/>
<param name="OdomBow/NNType" type="string" value="$(arg nn)"/>
<param name="OdomBow/LocalHistorySize" type="string" value="$(arg local_map)"/>
<param name="Odom/FillInfoData" type="string" value="$(arg rtabmapviz)"/>
<param name="frame_id" type="string" value="camera_link"/>
<param name="publish_tf" type="bool" value="true"/>
<param name="queue_size" type="int" value="30"/>
<param name="wait_for_transform" type="bool" value="true"/>
</node>
<!-- Visual SLAM -->
<!-- args: "delete_db_on_start" and "udebug" -->
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="subscribe_depth" type="bool" value="true"/>
<param name="frame_id" type="string" value="camera_link"/>
<remap from="rgb/image" to="/camera/rgb/image_color"/>
<remap from="depth/image" to="/camera/depth/image"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="odom" to="odom"/>
<param name="LccBow/MinInliers" type="string" value="10"/>
<param name="LccBow/InlierDistance" type="string" value="0.05"/>
<param name="queue_size" type="int" value="30"/>
</node>
<!-- Visualisation -->
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_depth" type="bool" value="true"/>
<param name="queue_size" type="int" value="30"/>
<param name="frame_id" type="string" value="camera_link"/>
<remap from="rgb/image" to="/camera/rgb/image_color"/>
<remap from="depth/image" to="/camera/depth/image"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="odom" to="odom"/>
</node>
</group>
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/config/rgbdslam_datasets.rviz"/>
<node if="$(arg rviz)" pkg="nodelet" type="nodelet" name="points_xyzrgb" args="standalone rtabmap_ros/point_cloud_xyzrgb">
<remap from="rgb/image" to="/camera/rgb/image_color"/>
<remap from="depth/image" to="/camera/depth/image"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="cloud" to="voxel_cloud" />
<param name="queue_size" type="int" value="10"/>
<param name="decimation" type="double" value="4"/>
</node>
</launch>
So I can't get in RVIZ tf and voxel_cloud.
What TFs do you record? What are minimal topics to get rtabmap_ros working from a rosbag file ?
Thanks in advance,
Micke
| Free forum by Nabble | Edit this page |