Re: rosbag rtabmap_ros
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rosbag-rtabmap-ros-tp248p254.html
Hello Micke,
I recorded a small rosbag as you did, but I should subscribe to /camera/depth_registered/image_raw instead of /camera/depth_registered/image. In your launch file above, I just changed /camera/depth/image to /camera/depth_registered/image_raw and it works.
Recording the bag:
Playing the bag with your launch file "test.launch" (modified for "/camera/depth_registered/image_raw"):
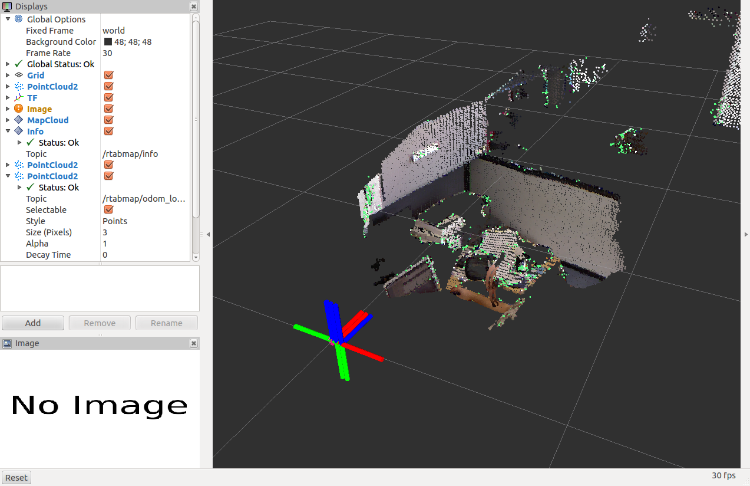
RVIZ (I should zoom out a little to see the cloud):
Cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/rosbag-rtabmap-ros-tp248p254.html
Hello Micke,
I recorded a small rosbag as you did, but I should subscribe to /camera/depth_registered/image_raw instead of /camera/depth_registered/image. In your launch file above, I just changed /camera/depth/image to /camera/depth_registered/image_raw and it works.
Recording the bag:
$ roslaunch openni_launch openni.launch depth_registration:=true
$ rosbag record -O test /tf /camera/rgb/image_color /camera/rgb/camera_info /camera/depth_registered/image_raw
(...kill rosbag)
$ rosbag info test.bag
path: test.bag
version: 2.0
duration: 8.9s
start: Mar 13 2015 11:39:26.64 (1426261166.64)
end: Mar 13 2015 11:39:35.52 (1426261175.52)
size: 230.2 MB
messages: 827
compression: none [158/158 chunks]
types: sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
tf2_msgs/TFMessage [94810edda583a504dfda3829e70d7eec]
topics: /camera/depth_registered/image_raw 157 msgs : sensor_msgs/Image
/camera/rgb/camera_info 157 msgs : sensor_msgs/CameraInfo
/camera/rgb/image_color 157 msgs : sensor_msgs/Image
/tf 356 msgs : tf2_msgs/TFMessage (4 connections)
Playing the bag with your launch file "test.launch" (modified for "/camera/depth_registered/image_raw"):
$ roslaunch test.launch $ rosbag play --clock test.bag
RVIZ (I should zoom out a little to see the cloud):
Cheers,
Mathieu
| Free forum by Nabble | Edit this page |