Re: Setup Festo robot with Kinect2 for navigation
Posted by marius on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Setup-Festo-robot-with-Kinect2-for-navigation-tp2552p2563.html
Thank you Mathieu for the response!
The manually tf between /base_link and /kinect2_base_link works.
Today i have tried to modify the rtabmap.launch file like u said.
I set the generel frame id to /base_link.
<arg name="frame_id" default="base_link"/>
Then i disabled the visual_odometry.
<arg name="visual_odometry" default="false"/>
Additionally i changed the camera topics for kinect2.
<arg name="rgb_topic" default="/kinect2/$(arg resolution)/image_color_rect" />
<arg name="depth_topic" default="/kinect2/$(arg resolution)/image_depth_rect" />
<arg name="camera_info_topic" default="/kinect2/$(arg resolution)/camera_info" />
When i launched the rtabmap.launch file the tf`s worked and the pointclouds are visualized but no map will be build.
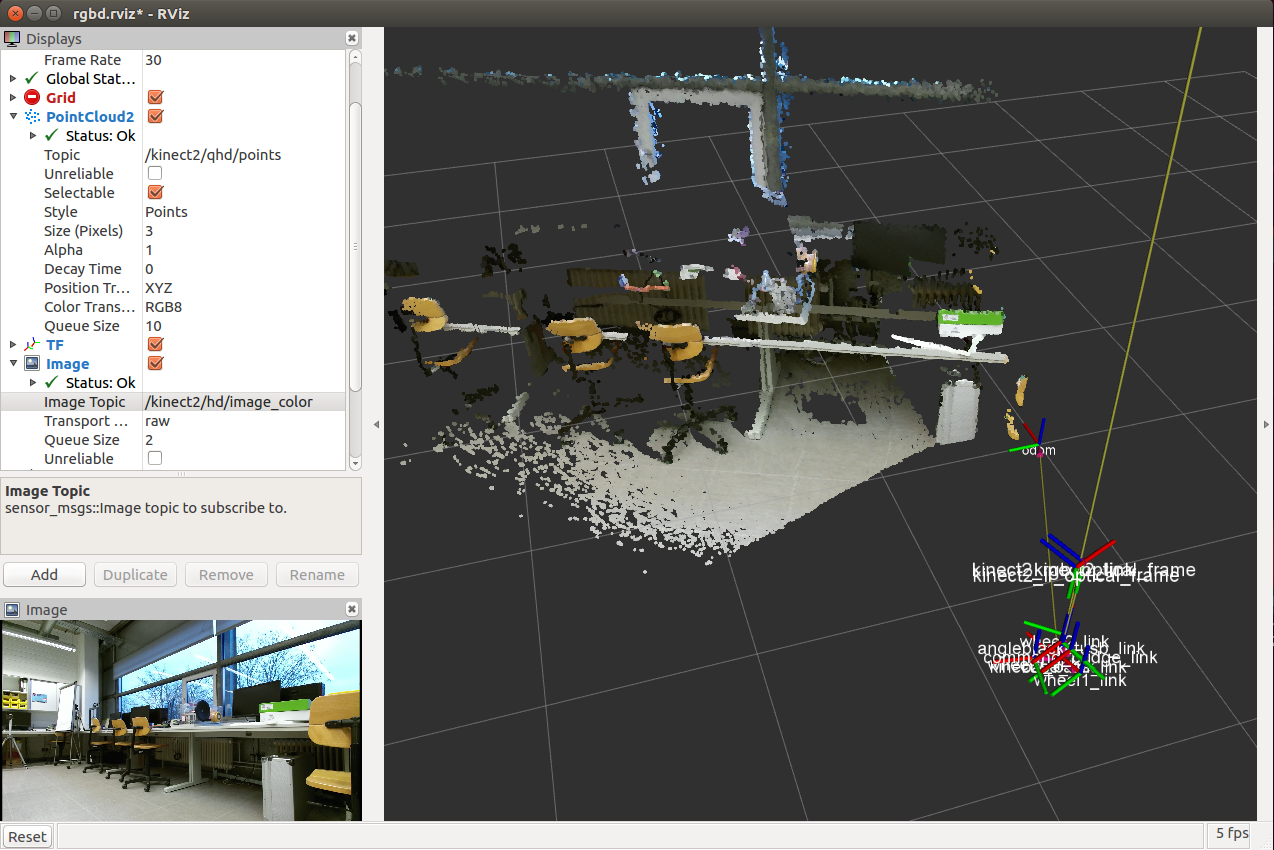
When i launch the rgbd_mapping_kinect2.launch file the map will be built.
Furthermore there is a delay between the camera pictures and the visualization of my robot in rviz (~6 seconds).
I checked the tf tree when i only launched the kinect2_nodes and rtabmap without the static tf from /base_link to /kinect2_base_link. The /kinect2_base_link was connected with /odom. Maybe there i got problems?
When i activate the visual_odometry a map will be built. How can i do this with my own robot odometry?
Here is the rtabmap.launch that i modified. I do not understand any params.
file:///opt/ros/kinetic/share/rtabmap_ros/launch/rtabmap_robotino_setup.launch
I hope u can help me this will be great ;)
Marius
URL: http://official-rtab-map-forum.206.s1.nabble.com/Setup-Festo-robot-with-Kinect2-for-navigation-tp2552p2563.html
Thank you Mathieu for the response!
The manually tf between /base_link and /kinect2_base_link works.
Today i have tried to modify the rtabmap.launch file like u said.
I set the generel frame id to /base_link.
<arg name="frame_id" default="base_link"/>
Then i disabled the visual_odometry.
<arg name="visual_odometry" default="false"/>
Additionally i changed the camera topics for kinect2.
<arg name="rgb_topic" default="/kinect2/$(arg resolution)/image_color_rect" />
<arg name="depth_topic" default="/kinect2/$(arg resolution)/image_depth_rect" />
<arg name="camera_info_topic" default="/kinect2/$(arg resolution)/camera_info" />
When i launched the rtabmap.launch file the tf`s worked and the pointclouds are visualized but no map will be build.
When i launch the rgbd_mapping_kinect2.launch file the map will be built.
Furthermore there is a delay between the camera pictures and the visualization of my robot in rviz (~6 seconds).
I checked the tf tree when i only launched the kinect2_nodes and rtabmap without the static tf from /base_link to /kinect2_base_link. The /kinect2_base_link was connected with /odom. Maybe there i got problems?
When i activate the visual_odometry a map will be built. How can i do this with my own robot odometry?
Here is the rtabmap.launch that i modified. I do not understand any params.
file:///opt/ros/kinetic/share/rtabmap_ros/launch/rtabmap_robotino_setup.launch
I hope u can help me this will be great ;)
Marius
| Free forum by Nabble | Edit this page |