Re: Setup Festo robot with Kinect2 for navigation
Posted by marius on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Setup-Festo-robot-with-Kinect2-for-navigation-tp2552p2566.html
Ok,
I`ve tried the method without editing the rtabmap.launch. The static tf`s and the roslaunch in single shells.
Last week i have already used this two static tf`s between base_link->kinect2_base_link->kinect2_link but i checked it again.
He is the tf tree: I only run my odometry_node (robotino_node) and the kinect2_node (aia_kinect2) and this two tf`s.
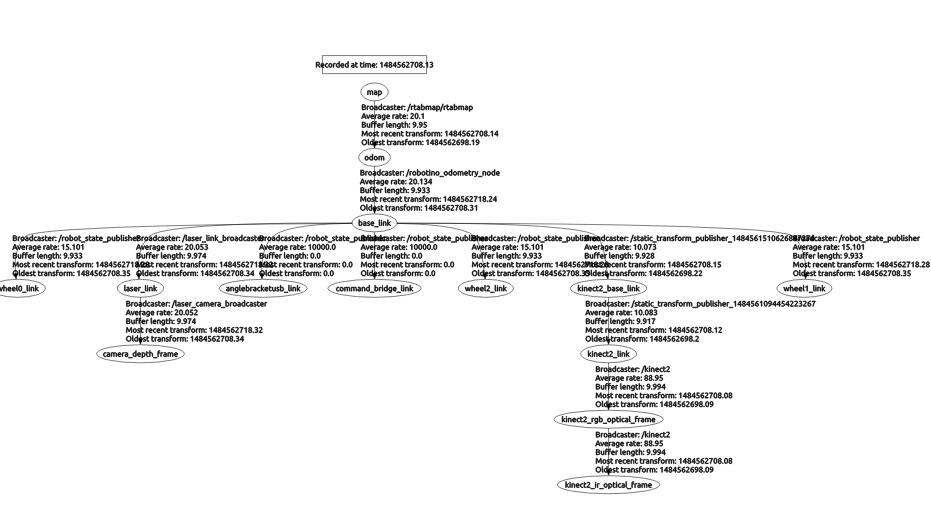
When i roslaunch your command i can visualize my pointclouds and also see my tf`s are moving, but no map will be built!
The tf`s are running in rviz, but there are some strange effects. There is a large delay between the pointclouds (nearly live) and the shown tf`s (delay ~6 seconds). When i dont use the static_tf between base_link and the camera the odom tf`s (base_link and wheel frames ...) moving simultaneously in rviz. But i think that is not the problem the no map appear...
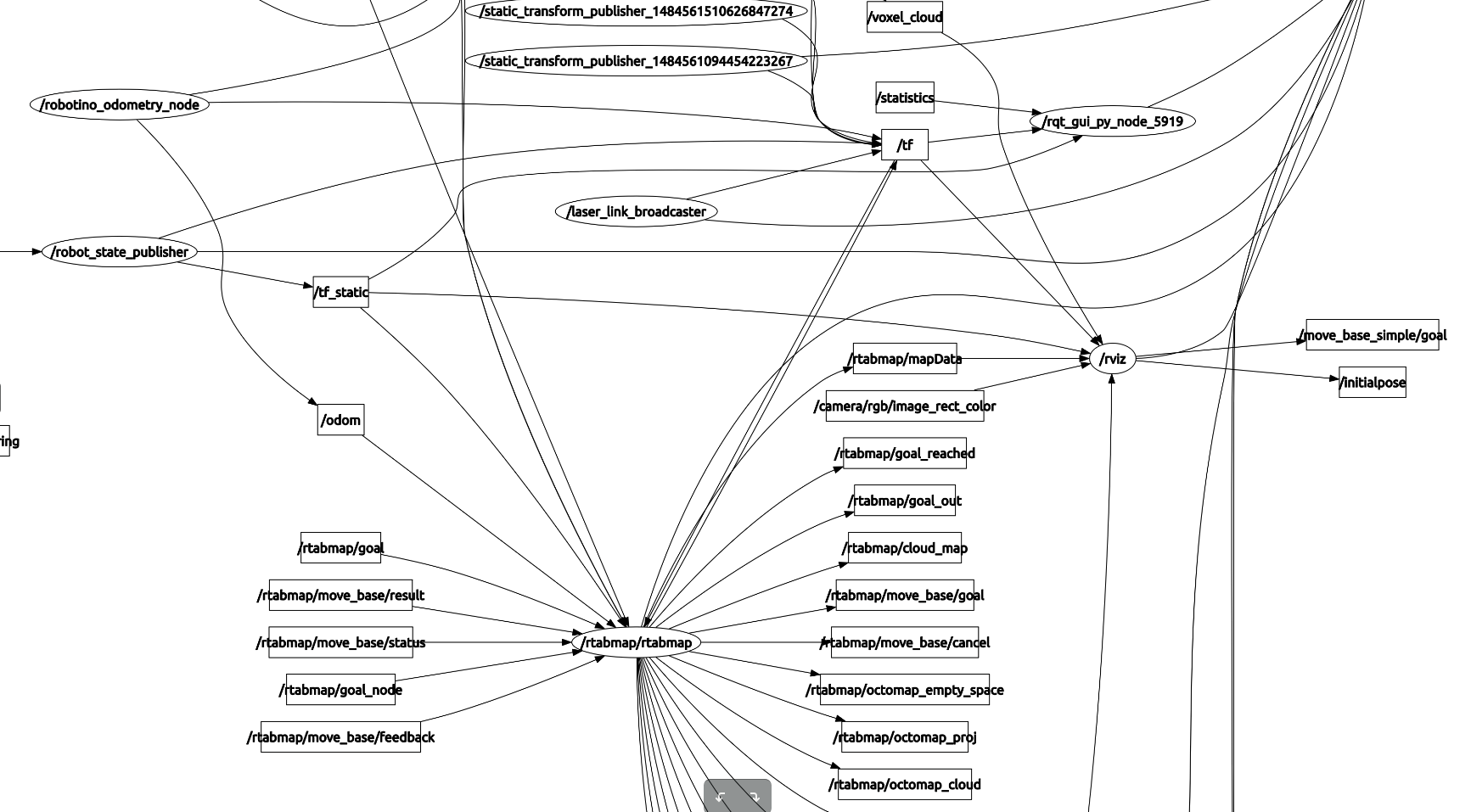
Here is a part of my node graph.
I have already used your roslaunch parameters: only the rtabmap_args i added today.
<arg name="rtabmap_args" value="--delete_db_on_start" />
<arg name="rgb_topic" value="/kinect2/qhd/image_color_rect" />
<arg name="depth_topic" value="/kinect2/qhd/image_depth_rect" />
<arg name="camera_info_topic" value="/kinect2/qhd/camera_info" />
<arg name="frame_id" value="base_link" />
<arg name="visual_odometry" value="false" />
<arg name="odom_topic" value="/odom" />
My next post is the eddited rtamp.launch i`ve try to use. Maybe u can check this.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Setup-Festo-robot-with-Kinect2-for-navigation-tp2552p2566.html
Ok,
I`ve tried the method without editing the rtabmap.launch. The static tf`s and the roslaunch in single shells.
Last week i have already used this two static tf`s between base_link->kinect2_base_link->kinect2_link but i checked it again.
He is the tf tree: I only run my odometry_node (robotino_node) and the kinect2_node (aia_kinect2) and this two tf`s.
When i roslaunch your command i can visualize my pointclouds and also see my tf`s are moving, but no map will be built!
The tf`s are running in rviz, but there are some strange effects. There is a large delay between the pointclouds (nearly live) and the shown tf`s (delay ~6 seconds). When i dont use the static_tf between base_link and the camera the odom tf`s (base_link and wheel frames ...) moving simultaneously in rviz. But i think that is not the problem the no map appear...
Here is a part of my node graph.
I have already used your roslaunch parameters: only the rtabmap_args i added today.
<arg name="rtabmap_args" value="--delete_db_on_start" />
<arg name="rgb_topic" value="/kinect2/qhd/image_color_rect" />
<arg name="depth_topic" value="/kinect2/qhd/image_depth_rect" />
<arg name="camera_info_topic" value="/kinect2/qhd/camera_info" />
<arg name="frame_id" value="base_link" />
<arg name="visual_odometry" value="false" />
<arg name="odom_topic" value="/odom" />
My next post is the eddited rtamp.launch i`ve try to use. Maybe u can check this.
| Free forum by Nabble | Edit this page |