Re: Setup Festo robot with Kinect2 for navigation
Posted by marius on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Setup-Festo-robot-with-Kinect2-for-navigation-tp2552p2579.html
Yes that`s right
The kinect2_node and rtabmap_node is running on my laptop. The robot has its own computer where the /odom and some other topics are published. The pcs communicate with WLAN. Yesterday i tried to sync the time stamps of this two computers with ntp and chrony but i does`t worked. The ntpdate or chronyd daemon is not available but i asked about this in the ubuntusers forum how to fix it. Is there an other way to sync this time stamps?
According two your answer that the time stamps are not syncronized: you talk about the buffer length ord oldest transform in the tf-tree? where i can see that the time stamps are not sync?
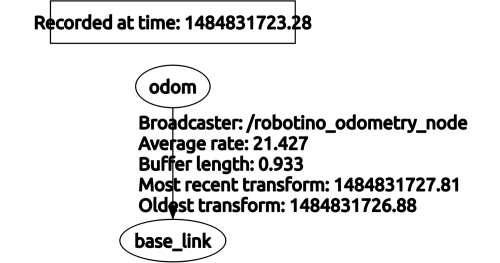
Today i studied the node who handle the odometry of the robot called robotino_node (ros.org)
I commented some nodes out that i only have the odom and base_link tf like this. (I shot this pic on my master laptop and the node is running on the robot computer)
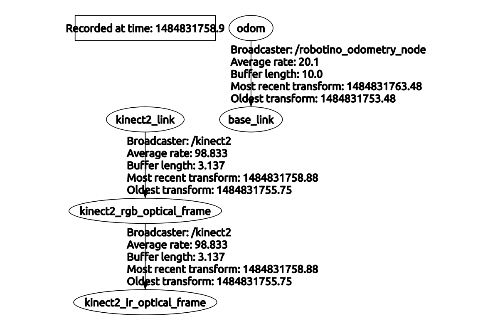
Step 2: run iaia_kinect2_node on master laptop
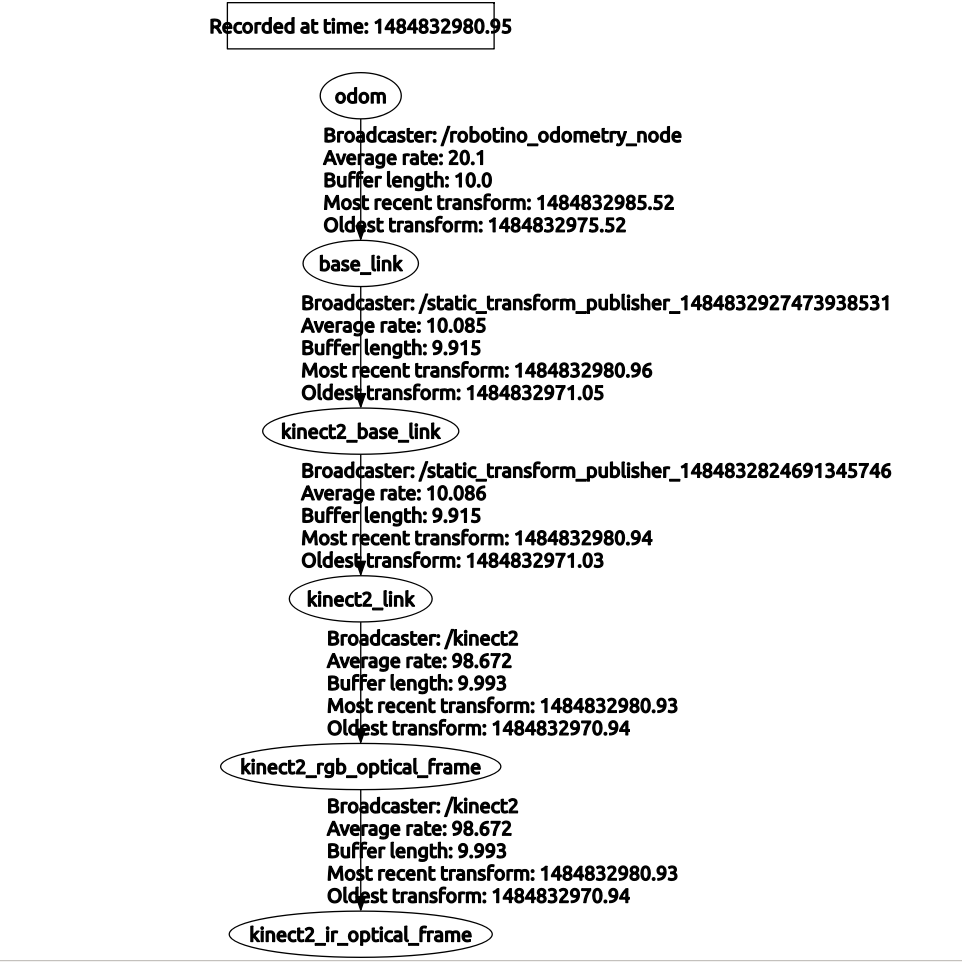
Step 3: tf between base_link -> Kinect2_base_link -> kinect2_link
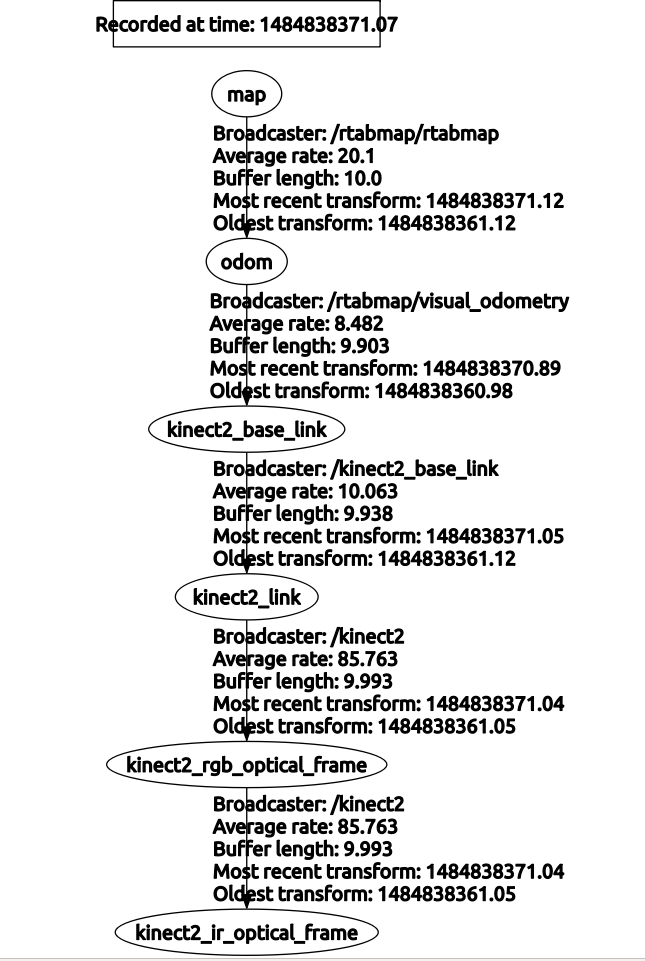
That`s the tf when i only run the rgbd_kinect2_mapping_node on my laptop with visual odometry.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Setup-Festo-robot-with-Kinect2-for-navigation-tp2552p2579.html
Yes that`s right
The kinect2_node and rtabmap_node is running on my laptop. The robot has its own computer where the /odom and some other topics are published. The pcs communicate with WLAN. Yesterday i tried to sync the time stamps of this two computers with ntp and chrony but i does`t worked. The ntpdate or chronyd daemon is not available but i asked about this in the ubuntusers forum how to fix it. Is there an other way to sync this time stamps?
According two your answer that the time stamps are not syncronized: you talk about the buffer length ord oldest transform in the tf-tree? where i can see that the time stamps are not sync?
Today i studied the node who handle the odometry of the robot called robotino_node (ros.org)
I commented some nodes out that i only have the odom and base_link tf like this. (I shot this pic on my master laptop and the node is running on the robot computer)
Step 2: run iaia_kinect2_node on master laptop
Step 3: tf between base_link -> Kinect2_base_link -> kinect2_link
That`s the tf when i only run the rgbd_kinect2_mapping_node on my laptop with visual odometry.
| Free forum by Nabble | Edit this page |