Re: How to process RGBD-SLAM datasets with RTAB-Map?
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-process-RGBD-SLAM-datasets-with-RTAB-Map-tp939p2621.html
Hi,
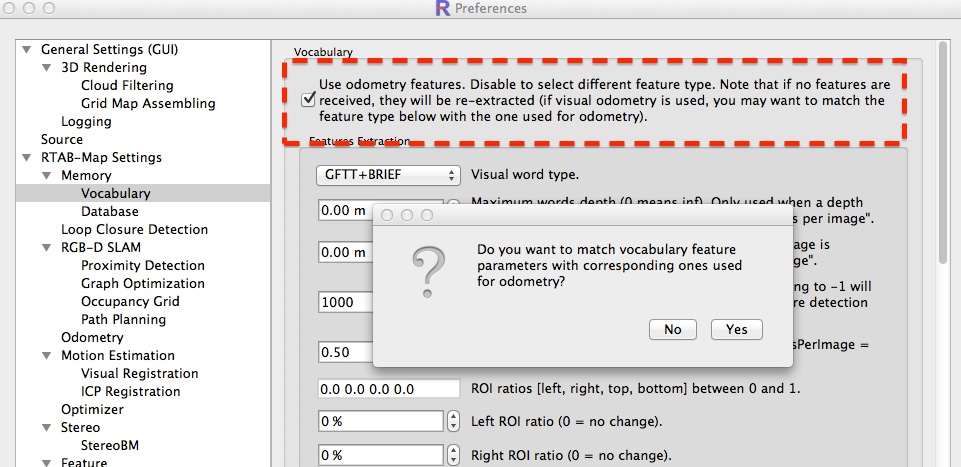
In right terms it is SURF for loop closure detection and GFTT/BRIEF for visual odometry. It is possible to re-use the already extracted features from odometry by checking "Use odometry features" box:
The minimum RANSAC inliers check is here (for PnP RANSAC) and here (for PCL RANSAC transform estimation).
cheers
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-process-RGBD-SLAM-datasets-with-RTAB-Map-tp939p2621.html
Hi,
In right terms it is SURF for loop closure detection and GFTT/BRIEF for visual odometry. It is possible to re-use the already extracted features from odometry by checking "Use odometry features" box:
The minimum RANSAC inliers check is here (for PnP RANSAC) and here (for PCL RANSAC transform estimation).
cheers
| Free forum by Nabble | Edit this page |