Re: Rtabmap mapping with two cameras
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Rtabmap-mapping-with-two-cameras-tp2662p2693.html
Hi,
There was a bug in the laser scan generation from the depth images (in rtabmap node). It is fixed in this commit.
Before:

With the fix:
For convenience, I added "map_negative_scan_empty_ray_tracing" to avoid filling space between the two kinects (as in the second screenshot above), while being able to keep "map_negative_poses_ignored" to update grid map with latest data even if we are not moving. Note that demo_two_kinects.launch example assumes that the cameras are parallel to ground, like in this post: http://official-rtab-map-forum.206.s1.nabble.com/demo-two-kinect-data-error-td1231.html#a1251, so the middle lines in the cameras simulate directly a laser scan.
In your setup, the kinect is tilted toward the ground. With "gen_scan" (which works exactly like depthimage_to_laserscan), the scan is generated like in the image below (middle line of the depth image):
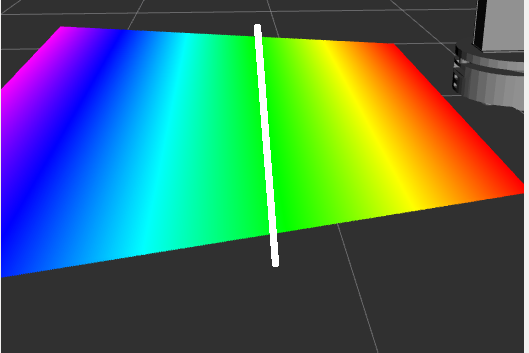
Can you show TF in RVIZ to better visualize how the cameras are configured? Here is an example with pointcloud_to_laserscan and a single camera tilted 45 degrees toward the ground:
For rtabmap node:
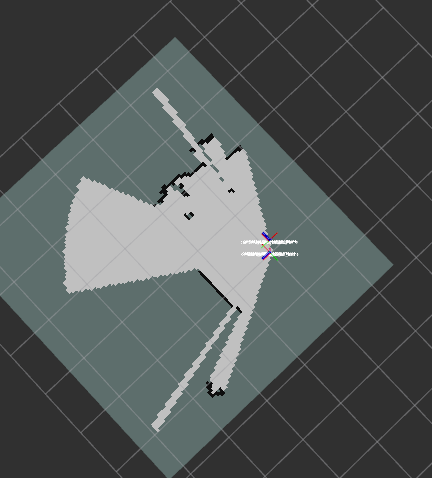
In red the computed laser scan with the corresponding grid map:

cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Rtabmap-mapping-with-two-cameras-tp2662p2693.html
Hi,
There was a bug in the laser scan generation from the depth images (in rtabmap node). It is fixed in this commit.
Before:
With the fix:
For convenience, I added "map_negative_scan_empty_ray_tracing" to avoid filling space between the two kinects (as in the second screenshot above), while being able to keep "map_negative_poses_ignored" to update grid map with latest data even if we are not moving. Note that demo_two_kinects.launch example assumes that the cameras are parallel to ground, like in this post: http://official-rtab-map-forum.206.s1.nabble.com/demo-two-kinect-data-error-td1231.html#a1251, so the middle lines in the cameras simulate directly a laser scan.
In your setup, the kinect is tilted toward the ground. With "gen_scan" (which works exactly like depthimage_to_laserscan), the scan is generated like in the image below (middle line of the depth image):
Can you show TF in RVIZ to better visualize how the cameras are configured? Here is an example with pointcloud_to_laserscan and a single camera tilted 45 degrees toward the ground:
<launch>
<!-- The fake scan will be 20 cm over /base_link -->
<node pkg="tf" type="static_transform_publisher" name="base_link"
args="0 0 0.2 0 0 0 base_link base_scan_link 100" />
<!-- Camera is tilted 45 degrees toward the ground, 80 cm over base_scan_link -->
<node pkg="tf" type="static_transform_publisher" name="base_scan_link"
args="0 0 0.8 0 0.785398163 0 base_scan_link camera_link 100" />
<!-- Camera -->
<include file="$(find freenect_launch)/launch/freenect.launch">
<arg name="depth_registration" value="True" />
</include>
<group ns="camera">
<!-- Run a VoxelGrid filter to clean NaNs and downsample the data -->
<node pkg="nodelet" type="nodelet" name="voxel_grid" args="load pcl/VoxelGrid camera_nodelet_manager" output="screen">
<remap from="~input" to="/camera/depth_registered/points" />
<remap from="~output" to="/camera/depth_registered/points_downsampled" />
<rosparam>
filter_field_name: z
filter_limit_min: 0.01
filter_limit_max: 10
filter_limit_negative: False
leaf_size: 0.01
</rosparam>
</node>
<node pkg="nodelet" type="nodelet" name="pointcloud_to_laserscan" args="load pointcloud_to_laserscan/pointcloud_to_laserscan_nodelet camera_nodelet_manager" output="screen">
<remap from="cloud_in" to="/camera/depth_registered/points_downsampled"/>
<!-- in base_scan_link referential -->
<param name="min_height" type="double" value="-0.05"/>
<param name="max_height" type="double" value="0.05"/>
<param name="target_frame" type="string" value="base_scan_link"/>
<param name="angle_min" type="double" value="-0.65"/>
<param name="angle_max" type="double" value="0.65"/>
<param name="angle_increment" type="double" value="0.006"/>
<param name="range_min" type="double" value="0"/>
<param name="range_max" type="double" value="4"/>
</node>
</group>
</launch>
For rtabmap node:
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap"> ... <param name="subscribe_scan" type="bool" value="true"/> <remap from="scan" to="/camera/scan"/> <!-- output of pointcloud_to_laserscan --> </node>
In red the computed laser scan with the corresponding grid map:
cheers,
Mathieu
| Free forum by Nabble | Edit this page |