Re: Build octomap with rtabmap?
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Build-octomap-with-rtabmap-tp68p2694.html
Hi,
To make demo_robot_mapping.launch creating an octomap, we should set Grid/FromDepth to true here, otherwise you will have warning messages like that:
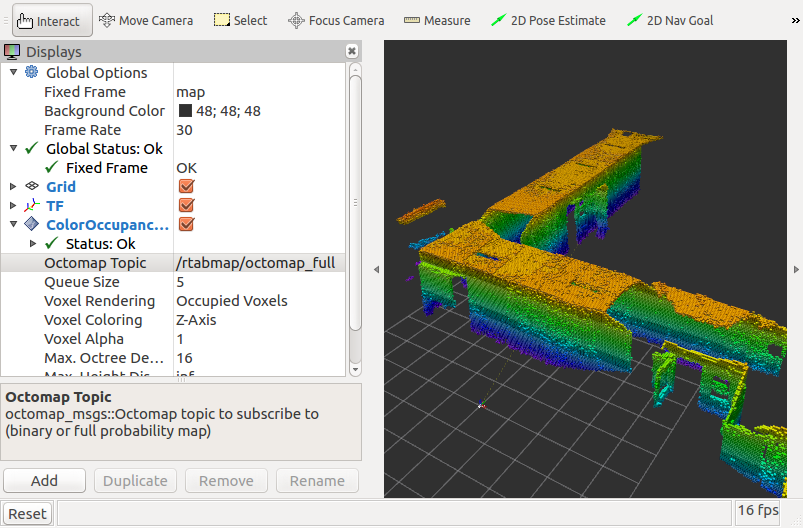
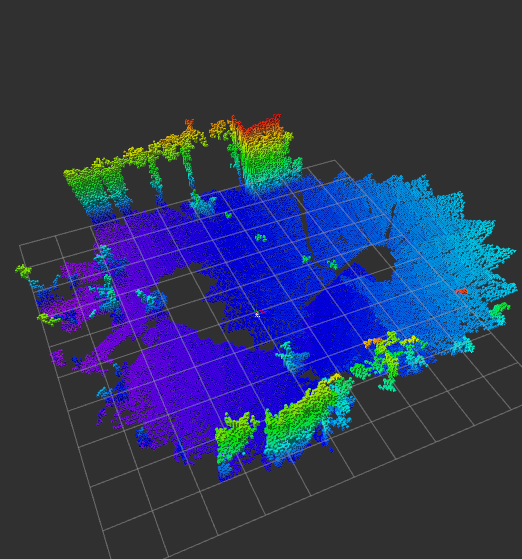
For stereo 20 Hz tutorial, I updated the stereo_20Hz.launch to fix the TF issue and added option "ground_is_obstacle" so that octomap is also built with the ground:
Note that these tests were done on Ubuntu 16.04/Kinetic.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Build-octomap-with-rtabmap-tp68p2694.html
Hi,
To make demo_robot_mapping.launch creating an octomap, we should set Grid/FromDepth to true here, otherwise you will have warning messages like that:
[ WARN] [1487979378.049216509, 1368730029.272126723]: Node -1: Cannot update octomap with 2D occupancy grids. Do "$ rosrun rtabmap_ros rtabmap --params | grep Grid" to see all occupancy grid parameters. [ WARN] [1487979378.049270915, 1368730029.272126723]: Node 1: Cannot update octomap with 2D occupancy grids. Do "$ rosrun rtabmap_ros rtabmap --params | grep Grid" to see all occupancy grid parameters. [ WARN] [1487979378.049311562, 1368730029.272126723]: Node 3: Cannot update octomap with 2D occupancy grids. Do "$ rosrun rtabmap_ros rtabmap --params | grep Grid" to see all occupancy grid parameters. ...
$ roslaunch rtabmap_ros demo_robot_mapping.launch rviz:=true rtabmapviz:=false $ rosbag play --clock demo_mapping.bag
For stereo 20 Hz tutorial, I updated the stereo_20Hz.launch to fix the TF issue and added option "ground_is_obstacle" so that octomap is also built with the ground:
$ roslaunch stereo_20Hz.launch ground_is_obstacle:=true
Note that these tests were done on Ubuntu 16.04/Kinetic.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |