Re: Calibration tool
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Calibration-tool-tp2738p2739.html
Hi,
The Segmentation Fault seems similar to this post, when Qt tries to create a native dialog. Not sure why, but on some systems Qt exits with a Seg fault. EDIT That line could be replaced with:
But yes, with the values in the boxes, we can recreate the calibration files (make sure to update the code as I just fixed a small problem with the default calibration config to get rgb image on right for Freenect2 driver... to make sure that "Switch images" checkbox is checked):
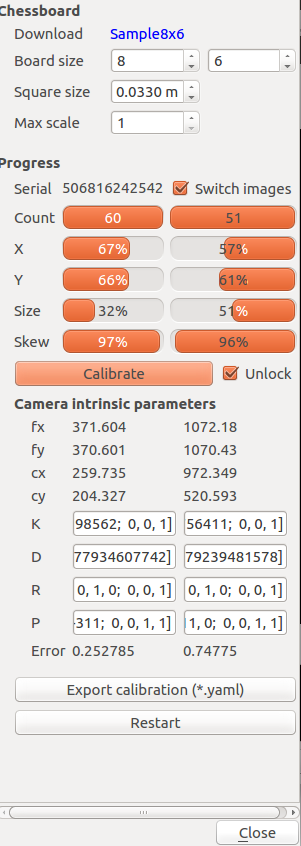
I had difficulty to increase the size parameter of the IR camera, so I clicked "unlock" to enable calibration button. As shown in the screenshot at the end of this post, the registration still seem good.
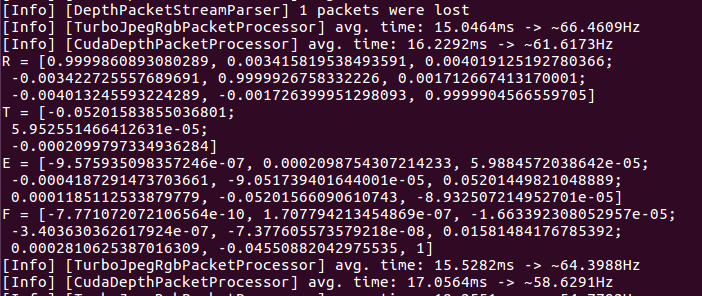
Just for the #####_pose.yaml file you need to check the values in terminal:
You need to create these yaml files in "~/Documents/RTAB-Map/camera_info" directory (K is the camera_matrix and the filename number is the serial shown in the calibration dialog):
506816242542_rgb.yaml
506816242542_depth.yaml
506816242542_pose.yaml
You can click on "Test" button in Preferences->Source to see if the calibration/registration is okay:

cheeers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Calibration-tool-tp2738p2739.html
Hi,
The Segmentation Fault seems similar to this post, when Qt tries to create a native dialog. Not sure why, but on some systems Qt exits with a Seg fault. EDIT That line could be replaced with:
filePath = savingDirectory_+"/"+cameraName+".yaml";
But yes, with the values in the boxes, we can recreate the calibration files (make sure to update the code as I just fixed a small problem with the default calibration config to get rgb image on right for Freenect2 driver... to make sure that "Switch images" checkbox is checked):
I had difficulty to increase the size parameter of the IR camera, so I clicked "unlock" to enable calibration button. As shown in the screenshot at the end of this post, the registration still seem good.
Just for the #####_pose.yaml file you need to check the values in terminal:
You need to create these yaml files in "~/Documents/RTAB-Map/camera_info" directory (K is the camera_matrix and the filename number is the serial shown in the calibration dialog):
506816242542_rgb.yaml
%YAML:1.0
camera_name: "506816242542_rgb"
image_width: 1920
image_height: 1080
camera_matrix:
rows: 3
cols: 3
data: [ 1.0721798374195264e+03, 0., 9.7234873307388148e+02, 0.,
1.0704297787811438e+03, 5.2059326075641104e+02, 0., 0., 1. ]
distortion_coefficients:
rows: 1
cols: 5
data: [ 6.3890971334225555e-02, -1.1705844216234957e-02,
-5.2067146440882184e-04, 6.8801290500431602e-03,
-4.1082792394815777e-02 ]
distortion_model: plumb_bob
rectification_matrix:
rows: 3
cols: 3
data: [ 1., 0., 0., 0., 1., 0., 0., 0., 1. ]
projection_matrix:
rows: 3
cols: 4
data: [ 1.0721798374195264e+03, 0., 9.7234873307388148e+02, 0., 0.,
1.0704297787811438e+03, 5.2059326075641104e+02, 0., 0., 0., 1.,
1. ]
506816242542_depth.yaml
%YAML:1.0
camera_name: "506816242542_depth"
image_width: 512
image_height: 424
camera_matrix:
rows: 3
cols: 3
data: [ 3.7160389677760753e+02, 0., 2.5973476728652292e+02, 0.,
3.7060055478796102e+02, 2.0432682541985619e+02, 0., 0., 1. ]
distortion_coefficients:
rows: 1
cols: 5
data: [ 1.1081198009714874e-01, -2.6347387222937568e-01,
-1.5926911199829262e-03, 7.9663544447176864e-03,
9.8164779346077424e-02 ]
distortion_model: plumb_bob
rectification_matrix:
rows: 3
cols: 3
data: [ 1., 0., 0., 0., 1., 0., 0., 0., 1. ]
projection_matrix:
rows: 3
cols: 4
data: [ 3.7160389677760753e+02, 0., 2.5973476728652292e+02, 0., 0.,
3.7060055478796102e+02, 2.0432682541985619e+02, 0., 0., 0., 1.,
1. ]
506816242542_pose.yaml
%YAML:1.0
camera_name: "506816242542"
rotation_matrix:
rows: 3
cols: 3
data: [ 9.9998608930802890e-01, 3.4158195384935909e-03,
4.0191251927803656e-03, -3.4227255576896906e-03,
9.9999267583322260e-01, 1.7126674131700012e-03,
-4.0132455932242886e-03, -1.7263999512980930e-03,
9.9999045665597053e-01 ]
translation_matrix:
rows: 3
cols: 1
data: [ -5.2015838550368010e-02, 5.9525514664126309e-05,
-2.0997973349362839e-04 ]
essential_matrix:
rows: 3
cols: 3
data: [ -9.5759350983572464e-07, 2.0987543072142328e-04,
5.9884572038641998e-05, -4.1872914737036608e-04,
-9.0517394016440014e-05, 5.2014498210488889e-02,
1.1851125338797785e-04, -5.2015660906107430e-02,
-8.9325072149527011e-05 ]
fundamental_matrix:
rows: 3
cols: 3
data: [ -7.7710720721065640e-10, 1.7077942134548691e-07,
-1.6633923080529570e-05, -3.4036303626179238e-07,
-7.3776055735792176e-08, 1.5814841767853919e-02,
2.8106253870163094e-04, -4.5508820429755348e-02, 1. ]
You can click on "Test" button in Preferences->Source to see if the calibration/registration is okay:
cheeers,
Mathieu
| Free forum by Nabble | Edit this page |