problem in simulation
Posted by polarbear on
URL: http://official-rtab-map-forum.206.s1.nabble.com/problem-in-simulation-tp2771.html
Hi,
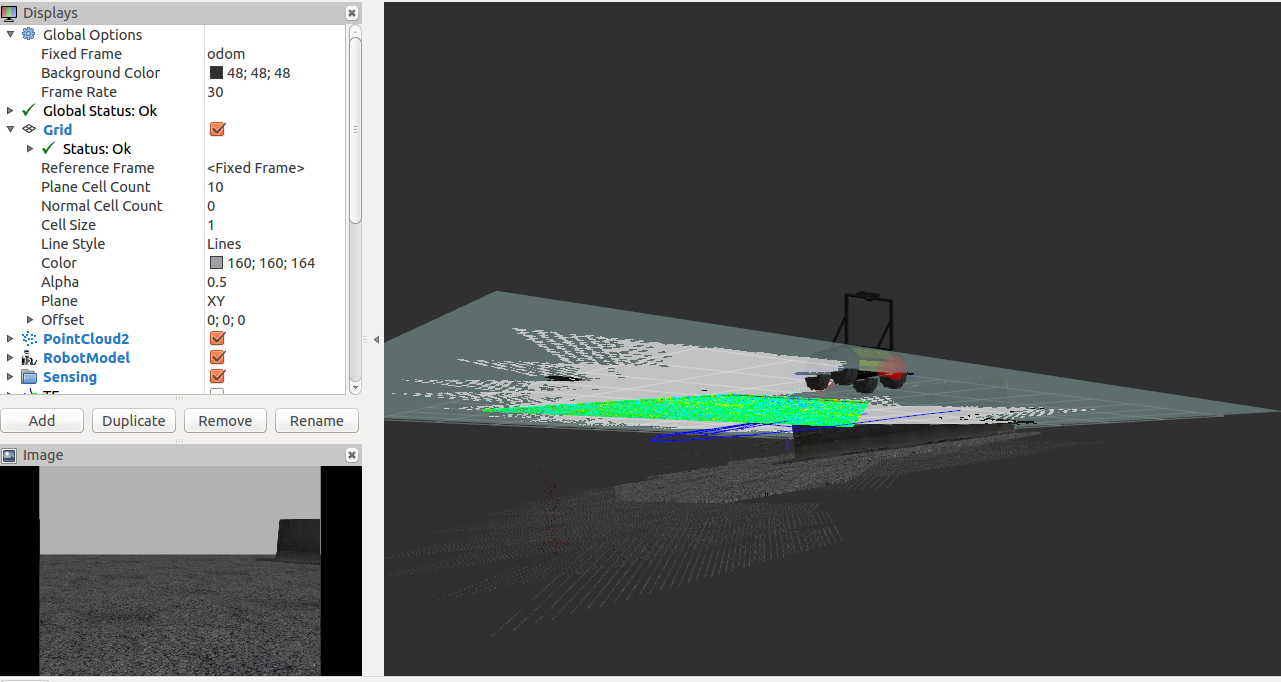
I use robot model Husky in Gazebo to do a simulation in stabmap(rviz mode).
But the result looks wrong and i don`t know hou to deal with it.
Like the screenshot.The model,proj_map,cloud_map and voxel_cloud are not at the suitable position.
I feel it may because some wrong with the TF setting, could you give me some suggestions?
Thanks!
URL: http://official-rtab-map-forum.206.s1.nabble.com/problem-in-simulation-tp2771.html
Hi,
I use robot model Husky in Gazebo to do a simulation in stabmap(rviz mode).
But the result looks wrong and i don`t know hou to deal with it.
Like the screenshot.The model,proj_map,cloud_map and voxel_cloud are not at the suitable position.
I feel it may because some wrong with the TF setting, could you give me some suggestions?
Thanks!
| Free forum by Nabble | Edit this page |