Re: Localizing two Kinects in one map
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Localizing-two-Kinects-in-one-map-tp2896p2901.html
Hi,
You are very close to have something working. I did a small example with two hand-held Kinect360 based on what you have done. See test_two_kinects_one_map.launch
First, I followed this tutorial to create a map with one of the kinect, this created the default ~/.ros/rtabmap.db. The launch file above uses that default database in localization mode for both rtabmap instances.
Second, I launched test_two_kinects_one_map.launch:
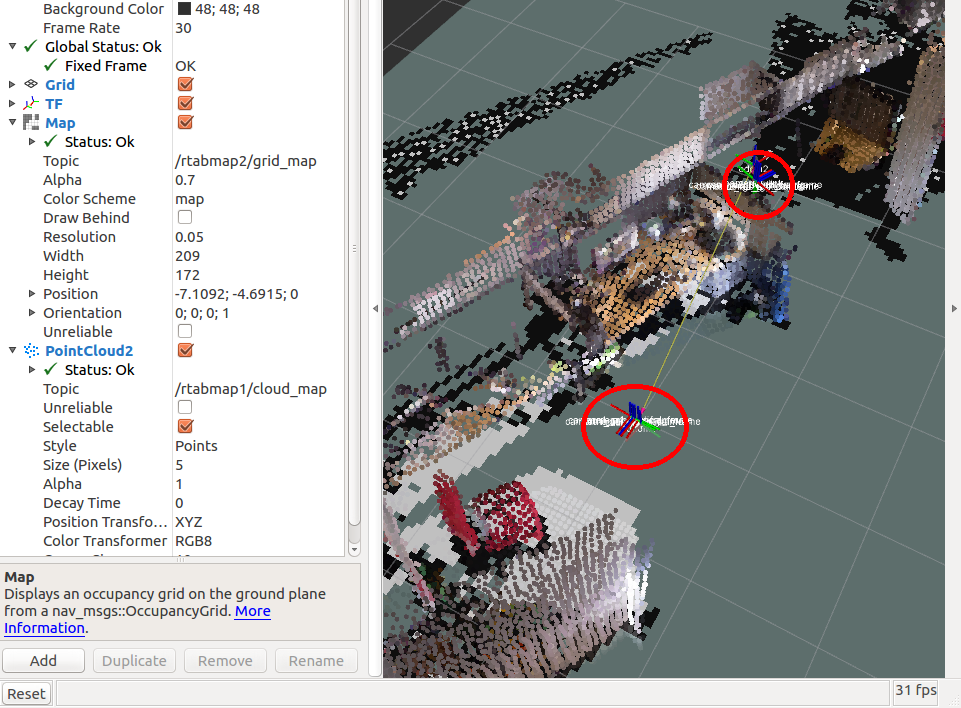

When both cameras are localized in the map, they appear at the same time in RVIZ with corresponding TF. In first screenshot above, I put the cloud map of rtabmap1 and the occupancy grid map of rtabmap2. They correspond correctly.
For your problem, it is like the map are not optimized from the same nodes in both rtabmap instances. Make sure RGBD/OptimizeFromGraphEnd is false (default is false). You may try to reproduce the example above with your Kinect2.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Localizing-two-Kinects-in-one-map-tp2896p2901.html
Hi,
You are very close to have something working. I did a small example with two hand-held Kinect360 based on what you have done. See test_two_kinects_one_map.launch
First, I followed this tutorial to create a map with one of the kinect, this created the default ~/.ros/rtabmap.db. The launch file above uses that default database in localization mode for both rtabmap instances.
Second, I launched test_two_kinects_one_map.launch:
When both cameras are localized in the map, they appear at the same time in RVIZ with corresponding TF. In first screenshot above, I put the cloud map of rtabmap1 and the occupancy grid map of rtabmap2. They correspond correctly.
For your problem, it is like the map are not optimized from the same nodes in both rtabmap instances. Make sure RGBD/OptimizeFromGraphEnd is false (default is false). You may try to reproduce the example above with your Kinect2.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |