Re: Incomplete depth cloud and no loop closures with Realsense R200
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Incomplete-depth-cloud-and-no-loop-closures-with-Realsense-R200-tp2934p2964.html
Hi,
To test more images for loop closure:
To extract more features (lowering the threshold):
For debugging, I would not use decimation right now, to extract more features (highest resolution generates more features):
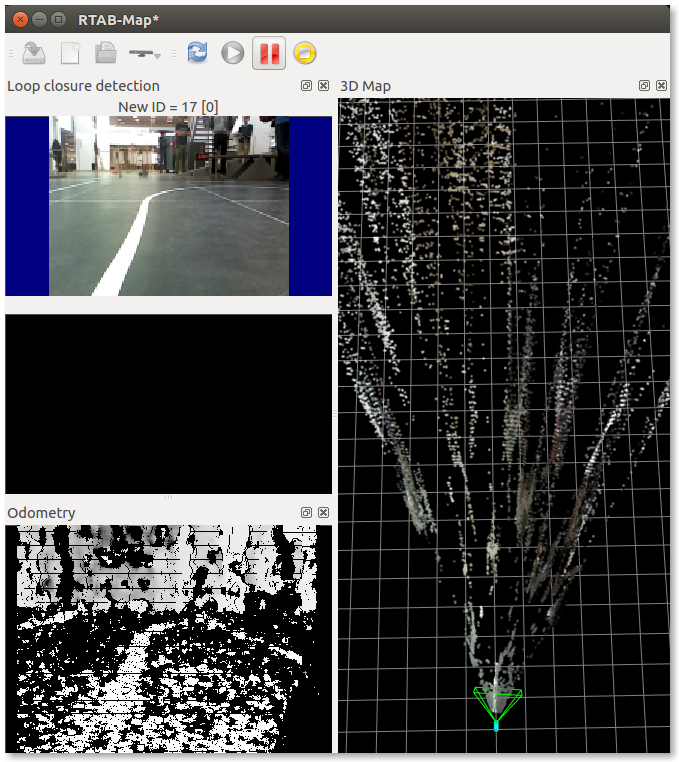
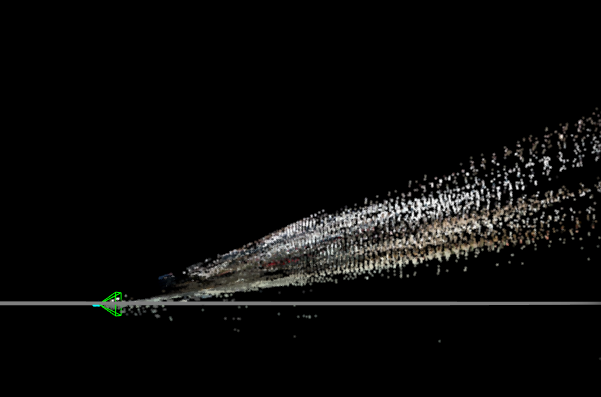
However, the major problem is that most visual features are out of range of the sensor (the accuracy of R200 is only good under ~3.5 meters).

Frame data for one frame:

It seems that TF is not correctly set between robot frame and camera frame (map is tilted):
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Incomplete-depth-cloud-and-no-loop-closures-with-Realsense-R200-tp2934p2964.html
Hi,
To test more images for loop closure:
<param name="RGBD/LocalLoopDetectionSpace" type="string" value="true"/>
To extract more features (lowering the threshold):
<param name="SURF/HessianThreshold" type="string" value="100"/>
For debugging, I would not use decimation right now, to extract more features (highest resolution generates more features):
<param name="Mem/ImagePreDecimation" type="string" value="1"/> <param name="Mem/ImagePostDecimation" type="string" value="1"/>
However, the major problem is that most visual features are out of range of the sensor (the accuracy of R200 is only good under ~3.5 meters).
Frame data for one frame:
It seems that TF is not correctly set between robot frame and camera frame (map is tilted):
cheers,
Mathieu
| Free forum by Nabble | Edit this page |