Re: Further Processing of camera images & RTAB data -- best way to do it?
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Further-Processing-of-camera-images-RTAB-data-best-way-to-do-it-tp3015p3035.html
Hi,
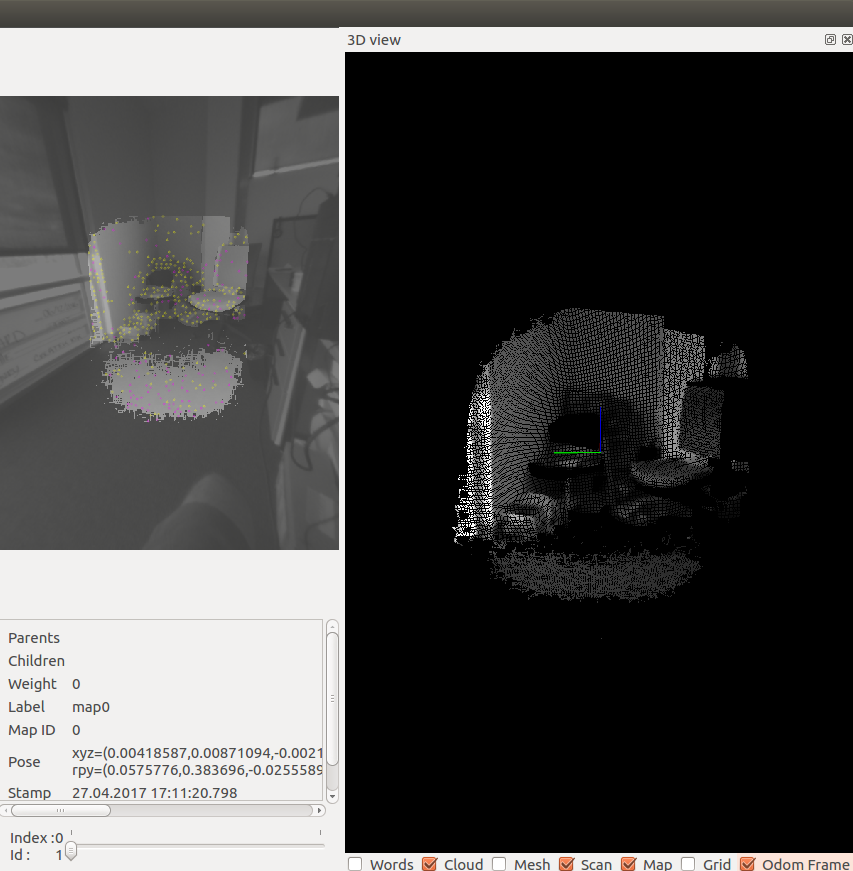
as how loop closure and visual odometry is done in rtabmap, a registered depth image is required with the RGB one. We could set the fisheye as the color image input (fisheye would need to be rectified), but the registered depth won't cover the whole field of view of the fisheye (just a small part at the center with low resolution). Features are extracted only where there is a valid depth.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Further-Processing-of-camera-images-RTAB-data-best-way-to-do-it-tp3015p3035.html
Hi,
as how loop closure and visual odometry is done in rtabmap, a registered depth image is required with the RGB one. We could set the fisheye as the color image input (fisheye would need to be rectified), but the registered depth won't cover the whole field of view of the fisheye (just a small part at the center with low resolution). Features are extracted only where there is a valid depth.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |