Navigation and re-use has exist mapping
Posted by zlVio on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigation-and-re-use-has-exist-mapping-tp3036.html
Hello everyone and dear author :
I reference this link : http://wiki.ros.org/rtabmap_ros and can mapping ,the data saved at .ros/rtabmap.db. I want navigation using the .ros/rtabmap.db ,which reference https://github.com/introlab/rtabmap_ros/tree/master/launch/azimut3,and my sensor is kinect1. fisrt,in the terminal,I input : (I)roslaunch az3_nav_kinect-only.launch.
then,(II) roslaunch az3_nav_client.launch . rviz display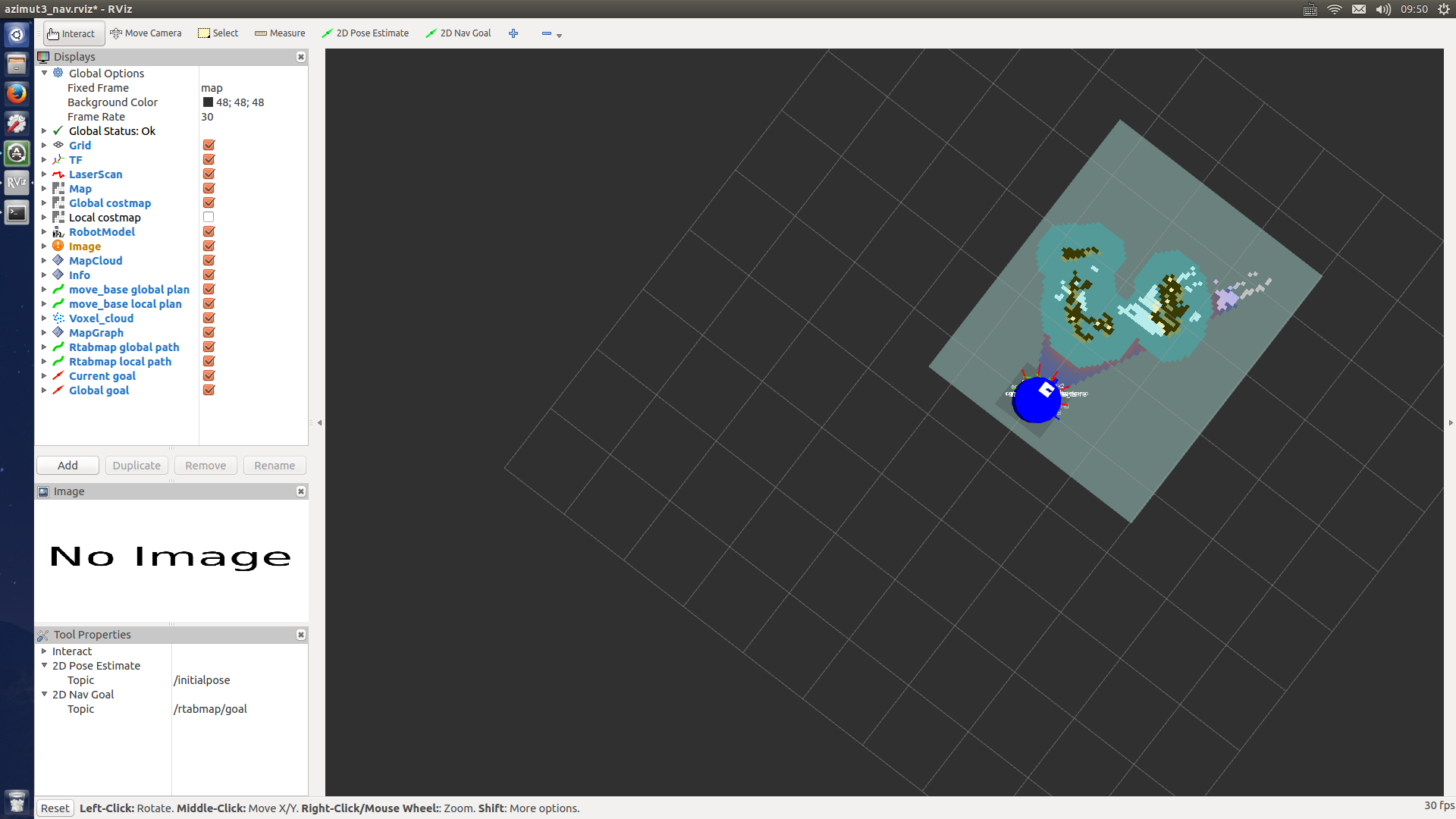
it can send nav goal by rviz and moved ,but it only run a moment and cann't reached goal. In addition, the .ros/rtabmap.db map also can not reused as https://youtu.be/H4-Fbd8WJW0 this video,why ?please tell me.thanks very much
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigation-and-re-use-has-exist-mapping-tp3036.html
Hello everyone and dear author :
I reference this link : http://wiki.ros.org/rtabmap_ros and can mapping ,the data saved at .ros/rtabmap.db. I want navigation using the .ros/rtabmap.db ,which reference https://github.com/introlab/rtabmap_ros/tree/master/launch/azimut3,and my sensor is kinect1. fisrt,in the terminal,I input : (I)roslaunch az3_nav_kinect-only.launch.
then,(II) roslaunch az3_nav_client.launch . rviz display
it can send nav goal by rviz and moved ,but it only run a moment and cann't reached goal. In addition, the .ros/rtabmap.db map also can not reused as https://youtu.be/H4-Fbd8WJW0 this video,why ?please tell me.thanks very much
| Free forum by Nabble | Edit this page |