Robot stuck in it own footprint
Posted by thanhnguyen on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Robot-stuck-in-it-own-footprint-tp3301.html
 Hi Mathieu,
Hi Mathieu,
Because the old one is too many questions so I change to this post to continue as question, sorry:))
1/
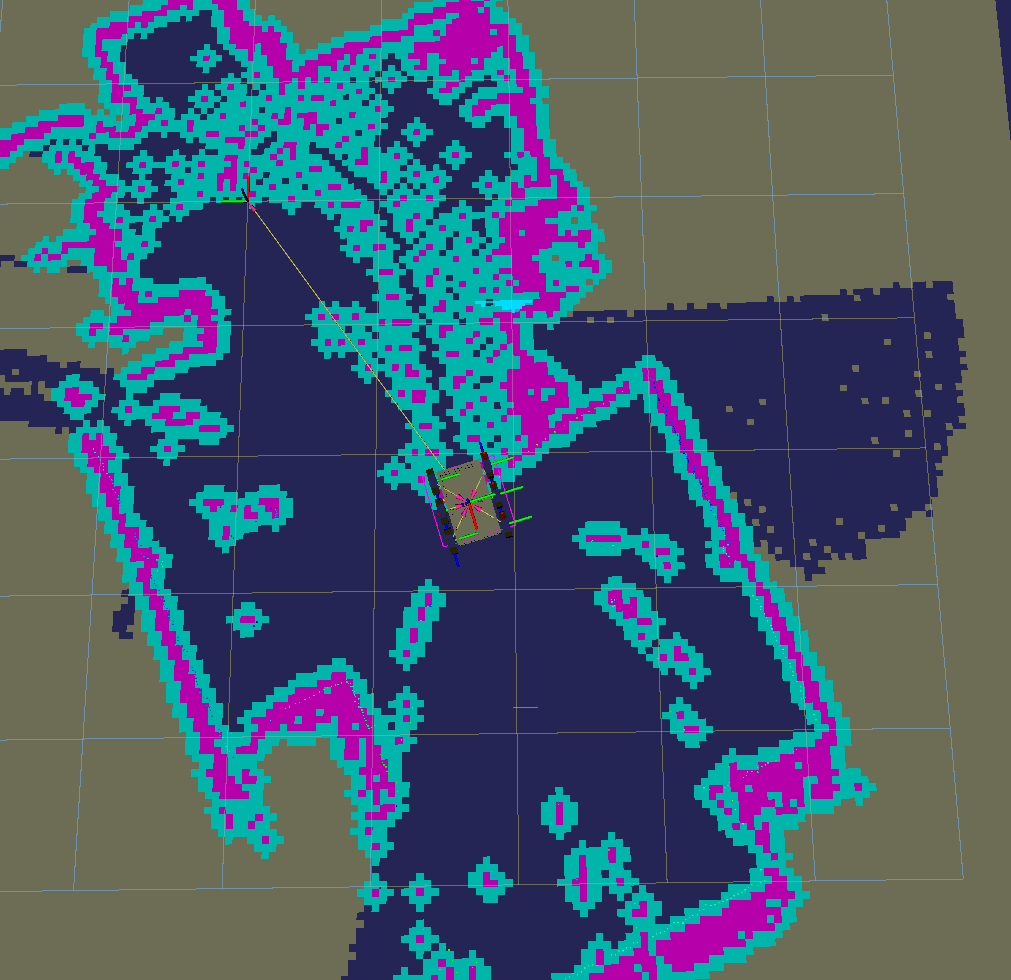
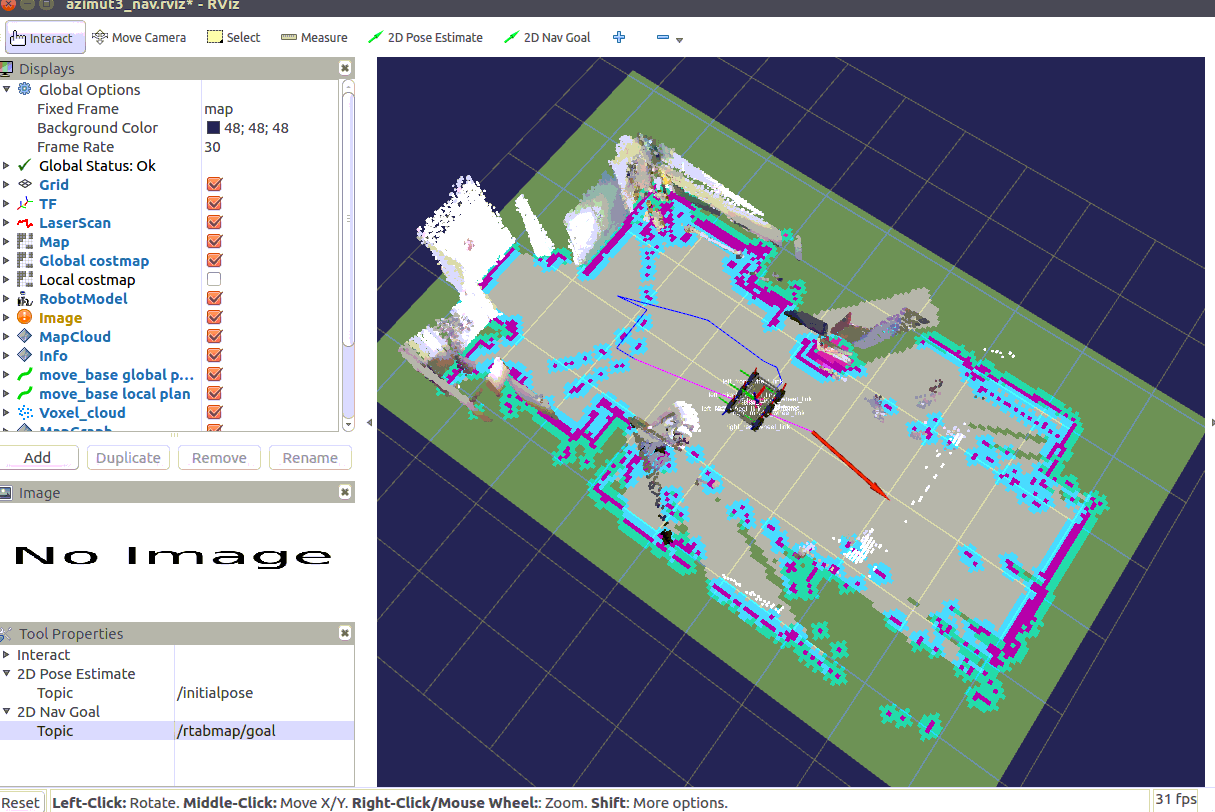
In this picture, my robot think it footprint is an obstacle, becasue the sick laser-scanner mount very low. Therefore, when I just create a map, my room is full obstacle and all of them is my robot footprint. I try do set a min_obstacle_height in costmap_commond parameter but nothing change.
2/ related to (1). Because of this problem, I decide not use move_base_simple but change to rtabmap/goal. But went I change to rtabmap/goal, the robot not move, just simple not move. although I already set "RGBD/OptimizeFromGraphEnd"=true. Here is the picture:
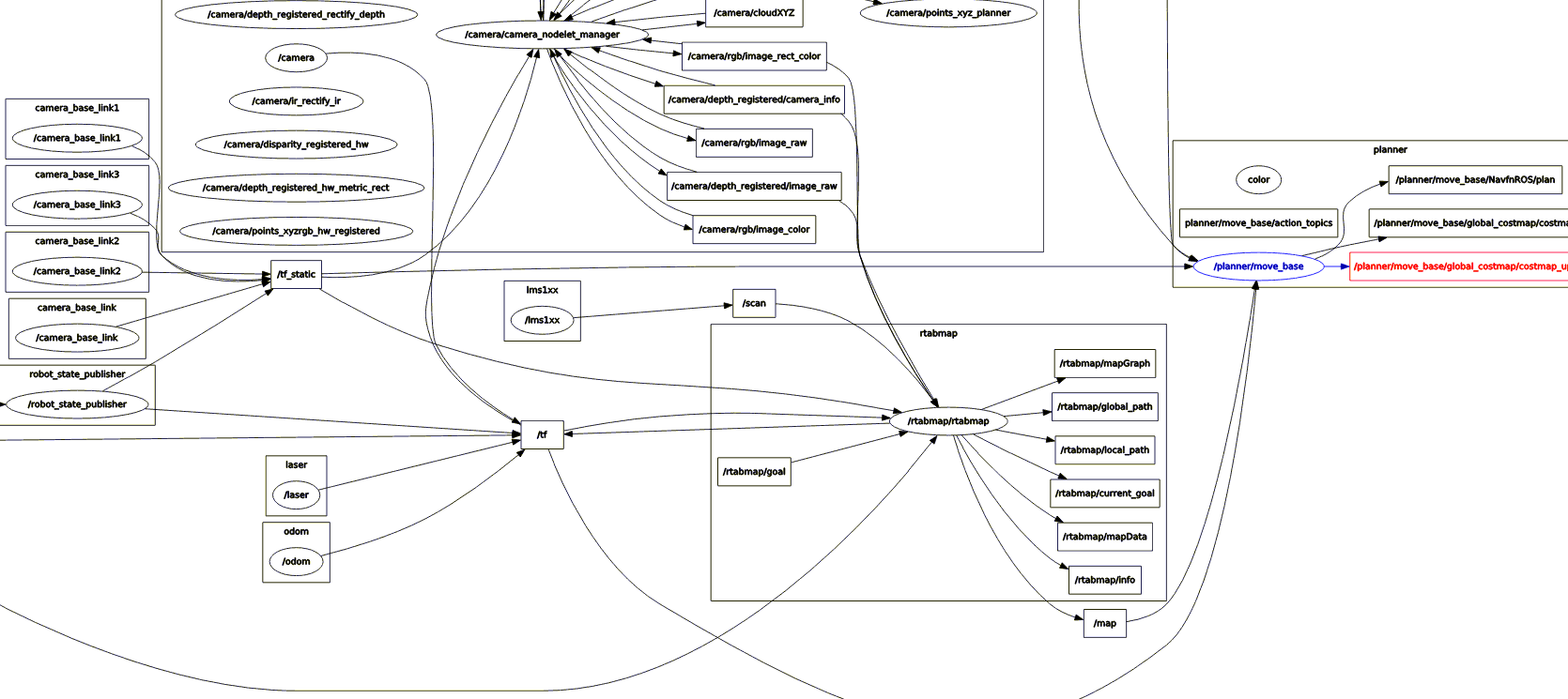
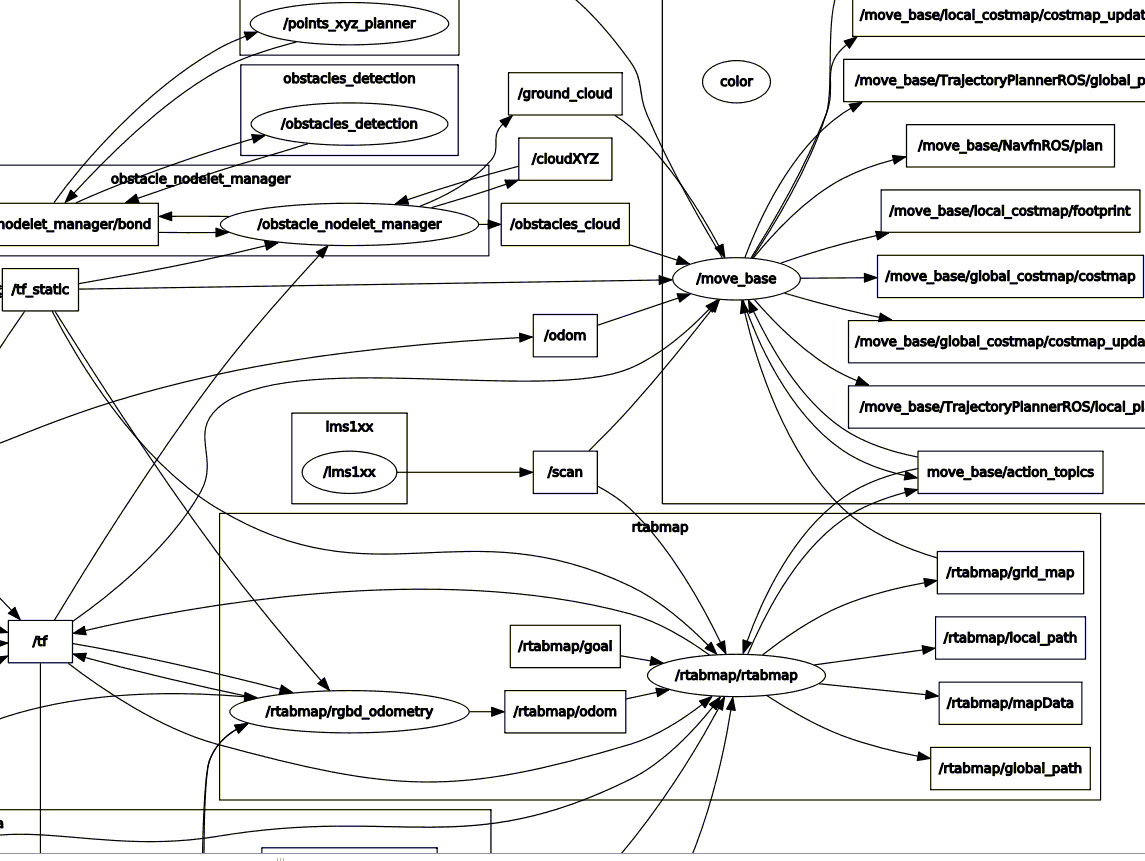
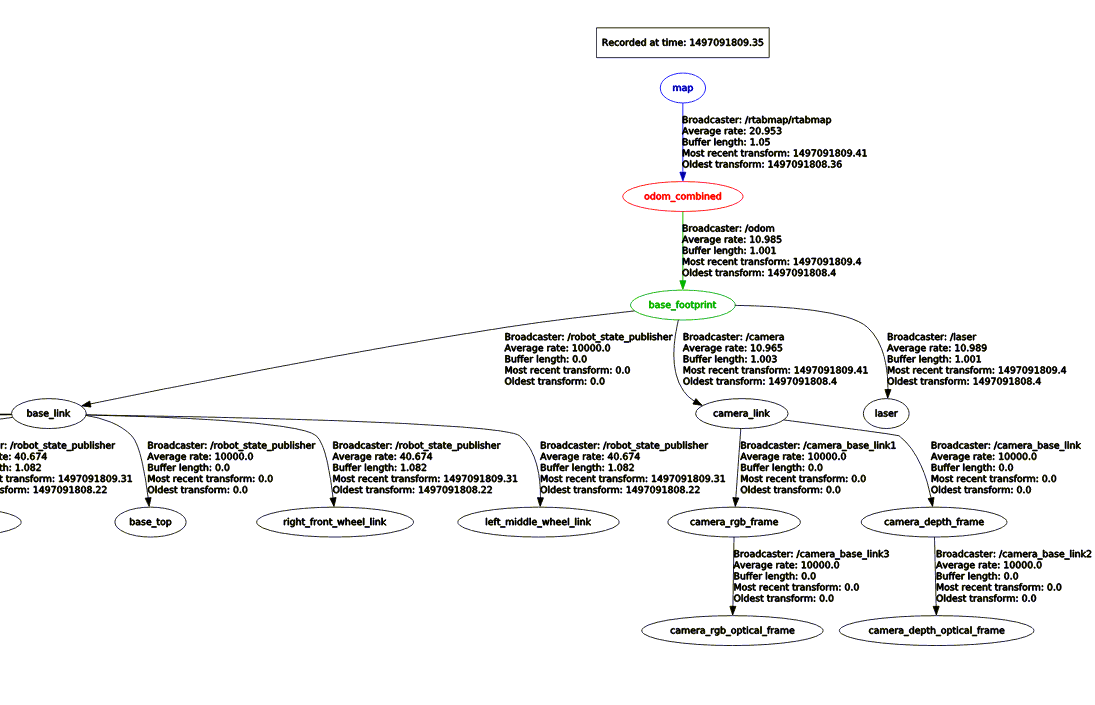
and when I go to rqt_graph, I see the rtabmap/goal doesn't link to move_base topic, that why the robot can not move:
3/ Finally, I try to modify files az3_nav to use in my robot volksbot, I change az3_bringup to volksbot_bringup, you can see in the file below:
az3_nav.launch
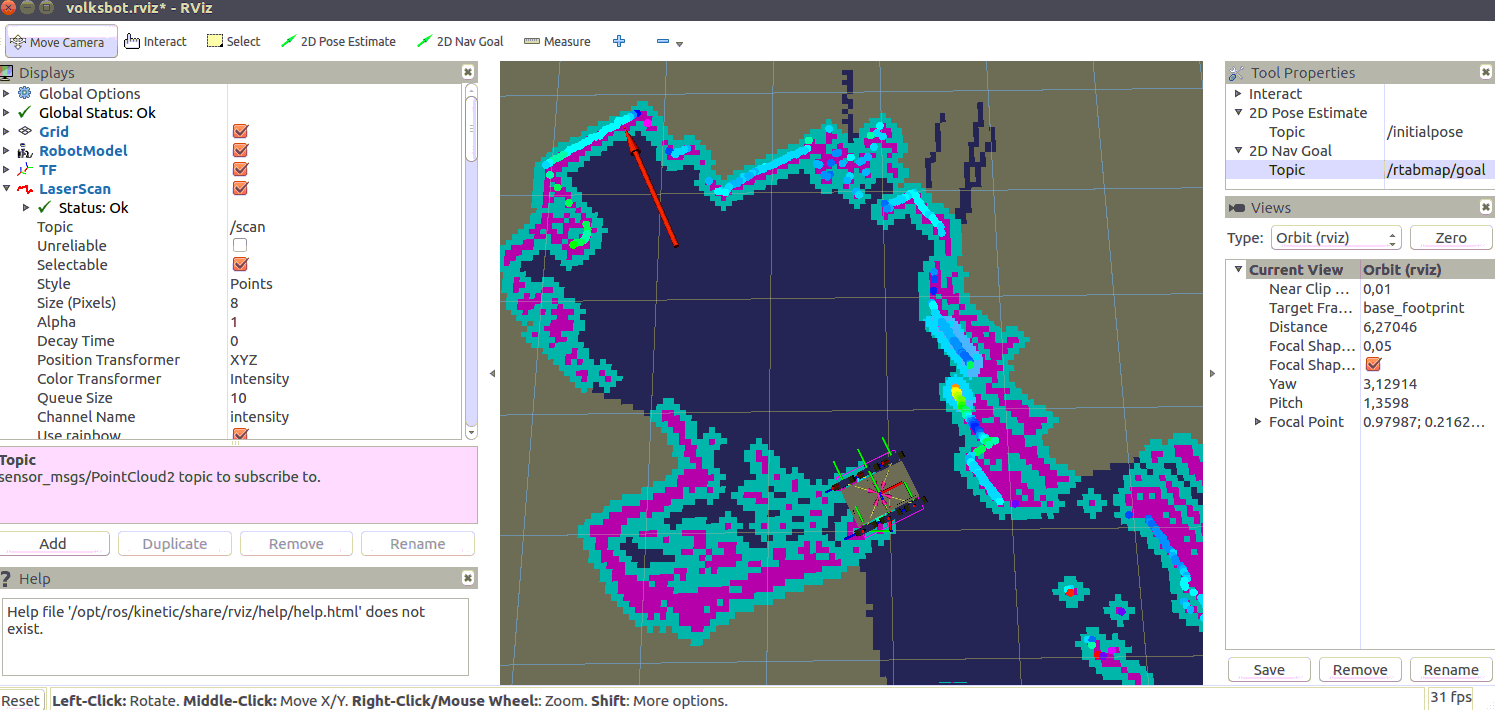
I got result like this, the robot can display the map but it dont know it odometry in the map, here is the result
And when I sen 2D navigation, robot not move because it dont know the odometry
URL: http://official-rtab-map-forum.206.s1.nabble.com/Robot-stuck-in-it-own-footprint-tp3301.html
Hi Mathieu,
Because the old one is too many questions so I change to this post to continue as question, sorry:))
1/
In this picture, my robot think it footprint is an obstacle, becasue the sick laser-scanner mount very low. Therefore, when I just create a map, my room is full obstacle and all of them is my robot footprint. I try do set a min_obstacle_height in costmap_commond parameter but nothing change.
2/ related to (1). Because of this problem, I decide not use move_base_simple but change to rtabmap/goal. But went I change to rtabmap/goal, the robot not move, just simple not move. although I already set "RGBD/OptimizeFromGraphEnd"=true. Here is the picture:
and when I go to rqt_graph, I see the rtabmap/goal doesn't link to move_base topic, that why the robot can not move:
3/ Finally, I try to modify files az3_nav to use in my robot volksbot, I change az3_bringup to volksbot_bringup, you can see in the file below:
az3_nav.launch
I got result like this, the robot can display the map but it dont know it odometry in the map, here is the result
And when I sen 2D navigation, robot not move because it dont know the odometry
| Free forum by Nabble | Edit this page |