Re: Using Realsense r200 camera for mapping
Posted by daniyara on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-Realsense-r200-camera-for-mapping-tp3332p3349.html
Hi Mathieu,
Thank you for helping me out! So when I try to play the bag file, I receive the following output in the terminal where I launched the rtabmap.launch file. For some reason I cannot get a transform from camera_link to camera_rgb_optical_frame. What do you think could be the problem?
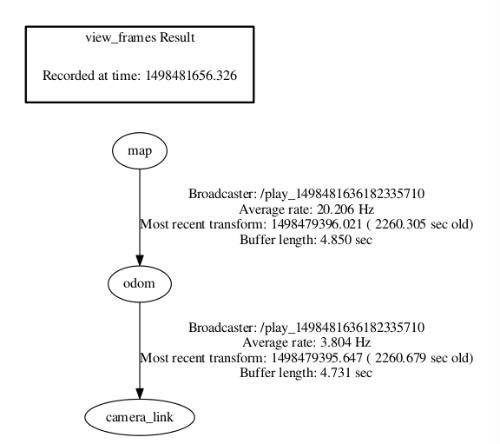
After running:
$ rosrun tf view_frames
It shows that no transform exists after the camera_link
cear@cear-Kangaroo-Mobile-Desktop:~/bagfiles$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" frame_id:=camera_link depth_topic:=/camera/depth_registered/sw_registered/image_rect_raw
... logging to /home/cear/.ros/log/1e50fdb6-5a67-11e7-a472-00215cef3f21/roslaunch-cear-Kangaroo-Mobile-Desktop-8580.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://cear-Kangaroo-Mobile-Desktop:33059/
SUMMARY
========
PARAMETERS
* /rosdistro: indigo
* /rosversion: 1.11.21
* /rtabmap/rgbd_odometry/approx_sync: True
* /rtabmap/rgbd_odometry/config_path:
* /rtabmap/rgbd_odometry/frame_id: camera_link
* /rtabmap/rgbd_odometry/queue_size: 10
* /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: True
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: camera_link
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: False
* /rtabmap/rtabmap/subscribe_stereo: False
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmapviz/frame_id: camera_link
* /rtabmap/rtabmapviz/queue_size: 10
* /rtabmap/rtabmapviz/subscribe_depth: True
* /rtabmap/rtabmapviz/subscribe_odom_info: True
* /rtabmap/rtabmapviz/subscribe_scan: False
* /rtabmap/rtabmapviz/subscribe_scan_cloud: False
* /rtabmap/rtabmapviz/subscribe_stereo: False
* /rtabmap/rtabmapviz/wait_for_transform_duration: 0.2
NODES
/rtabmap/
rgbd_odometry (rtabmap_ros/rgbd_odometry)
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[rtabmap/rgbd_odometry-1]: started with pid [8598]
process[rtabmap/rtabmap-2]: started with pid [8599]
process[rtabmap/rtabmapviz-3]: started with pid [8600]
[ INFO] [1498478689.685131258]: Starting node...
[ INFO] [1498478689.721655713]: Initializing nodelet with 4 worker threads.
[ INFO] [1498478689.875068667]: Starting node...
[ INFO] [1498478690.206772816]: rtabmapviz: Using configuration from "/home/cear/.ros/rtabmap_gui.ini"
[ INFO] [1498478691.449311016]: Reading parameters from the ROS server...
[ INFO] [1498478691.795028445]:
/rtabmap/rgbd_odometry subscribed to (approx sync):
/camera/rgb/image_rect_color,
/camera/depth_registered/sw_registered/image_rect_raw,
/camera/rgb/camera_info
[ INFO] [1498478691.975110676]: Parameters read = 0
[ INFO] [1498478692.539826771]:
/rtabmap/rtabmapviz subscribed to:
/camera/rgb/image_rect_color,
/camera/depth_registered/sw_registered/image_rect_raw,
/camera/rgb/camera_info,
/rtabmap/odom,
/rtabmap/odom_info
[ INFO] [1498478692.606576772]: rtabmapviz started.
[ INFO] [1498478700.400159167, 1498478370.189552426]: rtabmap: frame_id = camera_link
[ INFO] [1498478700.400320797, 1498478370.189552426]: rtabmap: map_frame_id = map
[ INFO] [1498478700.400373649, 1498478370.189552426]: rtabmap: queue_size = 10
[ INFO] [1498478700.400427051, 1498478370.189552426]: rtabmap: tf_delay = 0.050000
[ INFO] [1498478700.400473440, 1498478370.189552426]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1498478700.400519641, 1498478370.189552426]: rtabmap: depth_cameras = 1
[ INFO] [1498478700.400568031, 1498478370.189552426]: rtabmap: approx_sync = true
[ WARN] [1498478700.773998409, 1498478370.567159581]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.307806) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478700.986240837, 1498478370.778189319]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.541324) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ INFO] [1498478701.009095974, 1498478370.802617783]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1498478701.012701820, 1498478370.802617783]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ WARN] [1498478701.200430880, 1498478370.992665959]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.741237) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478701.403666770, 1498478371.197024774]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.941204) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478701.610582046, 1498478371.403818933]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.173964) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478701.834498100, 1498478371.624309936]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.374827) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478702.039415284, 1498478371.832435127]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.607600) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478702.242869444, 1498478372.036025591]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.807392) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478702.447103380, 1498478372.239976468]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.007908) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478702.649310486, 1498478372.441382247]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.207412) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478702.856871508, 1498478372.650019043]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.406877) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478703.072593140, 1498478372.865104765]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.639890) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478703.280424083, 1498478373.073957181]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.840311) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ INFO] [1498478703.363667409, 1498478373.140633616]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1498478703.364021883, 1498478373.140633616]: rtabmap: Deleted database "/home/cear/.ros/rtabmap.db" (--delete_db_on_start is set).
[ INFO] [1498478703.364126574, 1498478373.140633616]: rtabmap: Using database from "/home/cear/.ros/rtabmap.db".
[ WARN] [1498478703.497307866, 1498478373.290375422]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.039886) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ INFO] [1498478703.514196942, 1498478373.300455884]: rtabmap: Database version = "0.11.8".
[ WARN] [1498478703.705277976, 1498478373.498292769]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.239953) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478703.915433185, 1498478373.707720341]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.474020) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ INFO] [1498478703.935389688, 1498478373.723250633]:
/rtabmap/rtabmap subscribed to (approx sync):
/camera/rgb/image_rect_color,
/camera/depth_registered/sw_registered/image_rect_raw,
/camera/rgb/camera_info,
/rtabmap/odom
[ INFO] [1498478703.935921668, 1498478373.723250633]: rtabmap 0.11.8 started...
[ WARN] [1498478704.132651104, 1498478373.922224956]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.673098) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478704.330341259, 1498478374.123225648]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.906647) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
URL: http://official-rtab-map-forum.206.s1.nabble.com/Using-Realsense-r200-camera-for-mapping-tp3332p3349.html
Hi Mathieu,
Thank you for helping me out! So when I try to play the bag file, I receive the following output in the terminal where I launched the rtabmap.launch file. For some reason I cannot get a transform from camera_link to camera_rgb_optical_frame. What do you think could be the problem?
After running:
$ rosrun tf view_frames
It shows that no transform exists after the camera_link
cear@cear-Kangaroo-Mobile-Desktop:~/bagfiles$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" frame_id:=camera_link depth_topic:=/camera/depth_registered/sw_registered/image_rect_raw
... logging to /home/cear/.ros/log/1e50fdb6-5a67-11e7-a472-00215cef3f21/roslaunch-cear-Kangaroo-Mobile-Desktop-8580.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://cear-Kangaroo-Mobile-Desktop:33059/
SUMMARY
========
PARAMETERS
* /rosdistro: indigo
* /rosversion: 1.11.21
* /rtabmap/rgbd_odometry/approx_sync: True
* /rtabmap/rgbd_odometry/config_path:
* /rtabmap/rgbd_odometry/frame_id: camera_link
* /rtabmap/rgbd_odometry/queue_size: 10
* /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: True
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: camera_link
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: False
* /rtabmap/rtabmap/subscribe_stereo: False
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
* /rtabmap/rtabmapviz/frame_id: camera_link
* /rtabmap/rtabmapviz/queue_size: 10
* /rtabmap/rtabmapviz/subscribe_depth: True
* /rtabmap/rtabmapviz/subscribe_odom_info: True
* /rtabmap/rtabmapviz/subscribe_scan: False
* /rtabmap/rtabmapviz/subscribe_scan_cloud: False
* /rtabmap/rtabmapviz/subscribe_stereo: False
* /rtabmap/rtabmapviz/wait_for_transform_duration: 0.2
NODES
/rtabmap/
rgbd_odometry (rtabmap_ros/rgbd_odometry)
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[rtabmap/rgbd_odometry-1]: started with pid [8598]
process[rtabmap/rtabmap-2]: started with pid [8599]
process[rtabmap/rtabmapviz-3]: started with pid [8600]
[ INFO] [1498478689.685131258]: Starting node...
[ INFO] [1498478689.721655713]: Initializing nodelet with 4 worker threads.
[ INFO] [1498478689.875068667]: Starting node...
[ INFO] [1498478690.206772816]: rtabmapviz: Using configuration from "/home/cear/.ros/rtabmap_gui.ini"
[ INFO] [1498478691.449311016]: Reading parameters from the ROS server...
[ INFO] [1498478691.795028445]:
/rtabmap/rgbd_odometry subscribed to (approx sync):
/camera/rgb/image_rect_color,
/camera/depth_registered/sw_registered/image_rect_raw,
/camera/rgb/camera_info
[ INFO] [1498478691.975110676]: Parameters read = 0
[ INFO] [1498478692.539826771]:
/rtabmap/rtabmapviz subscribed to:
/camera/rgb/image_rect_color,
/camera/depth_registered/sw_registered/image_rect_raw,
/camera/rgb/camera_info,
/rtabmap/odom,
/rtabmap/odom_info
[ INFO] [1498478692.606576772]: rtabmapviz started.
[ INFO] [1498478700.400159167, 1498478370.189552426]: rtabmap: frame_id = camera_link
[ INFO] [1498478700.400320797, 1498478370.189552426]: rtabmap: map_frame_id = map
[ INFO] [1498478700.400373649, 1498478370.189552426]: rtabmap: queue_size = 10
[ INFO] [1498478700.400427051, 1498478370.189552426]: rtabmap: tf_delay = 0.050000
[ INFO] [1498478700.400473440, 1498478370.189552426]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1498478700.400519641, 1498478370.189552426]: rtabmap: depth_cameras = 1
[ INFO] [1498478700.400568031, 1498478370.189552426]: rtabmap: approx_sync = true
[ WARN] [1498478700.773998409, 1498478370.567159581]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.307806) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478700.986240837, 1498478370.778189319]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.541324) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ INFO] [1498478701.009095974, 1498478370.802617783]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1498478701.012701820, 1498478370.802617783]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
[ WARN] [1498478701.200430880, 1498478370.992665959]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.741237) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478701.403666770, 1498478371.197024774]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.941204) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478701.610582046, 1498478371.403818933]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.173964) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478701.834498100, 1498478371.624309936]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.374827) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478702.039415284, 1498478371.832435127]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.607600) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478702.242869444, 1498478372.036025591]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.807392) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478702.447103380, 1498478372.239976468]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.007908) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478702.649310486, 1498478372.441382247]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.207412) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478702.856871508, 1498478372.650019043]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.406877) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478703.072593140, 1498478372.865104765]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.639890) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478703.280424083, 1498478373.073957181]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.840311) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ INFO] [1498478703.363667409, 1498478373.140633616]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1498478703.364021883, 1498478373.140633616]: rtabmap: Deleted database "/home/cear/.ros/rtabmap.db" (--delete_db_on_start is set).
[ INFO] [1498478703.364126574, 1498478373.140633616]: rtabmap: Using database from "/home/cear/.ros/rtabmap.db".
[ WARN] [1498478703.497307866, 1498478373.290375422]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.039886) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ INFO] [1498478703.514196942, 1498478373.300455884]: rtabmap: Database version = "0.11.8".
[ WARN] [1498478703.705277976, 1498478373.498292769]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.239953) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478703.915433185, 1498478373.707720341]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.474020) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ INFO] [1498478703.935389688, 1498478373.723250633]:
/rtabmap/rtabmap subscribed to (approx sync):
/camera/rgb/image_rect_color,
/camera/depth_registered/sw_registered/image_rect_raw,
/camera/rgb/camera_info,
/rtabmap/odom
[ INFO] [1498478703.935921668, 1498478373.723250633]: rtabmap 0.11.8 started...
[ WARN] [1498478704.132651104, 1498478373.922224956]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.673098) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
[ WARN] [1498478704.330341259, 1498478374.123225648]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.906647) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)!
| Free forum by Nabble | Edit this page |