Re: Robot stuck in it own footprint
Posted by thanhnguyen on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Robot-stuck-in-it-own-footprint-tp3301p3420.html
Thank you, it work!!!
Now the robot can localization in the map use it odometry, not odometry from kinect any_more.
I have two question.
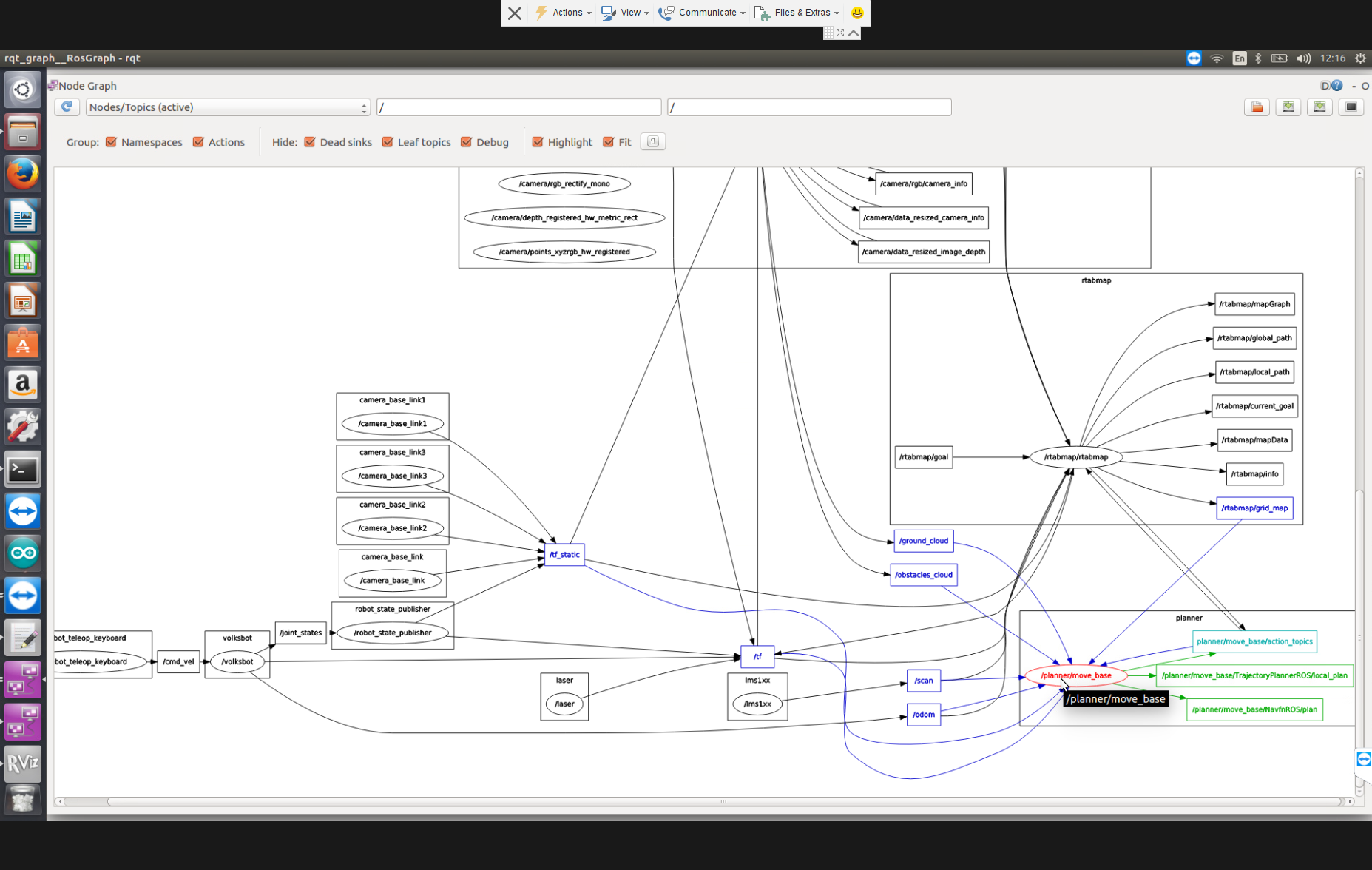
1/Question 1: when I sent the goal robot not move, topic of 2D Nav Goal is :/rtabmap/goal. And I check the rqt_graph, here the planner/move_base not have any connect with /cmd_vel, which that should be have if I use rgbd_odometry from kinect.
This is my launch files.
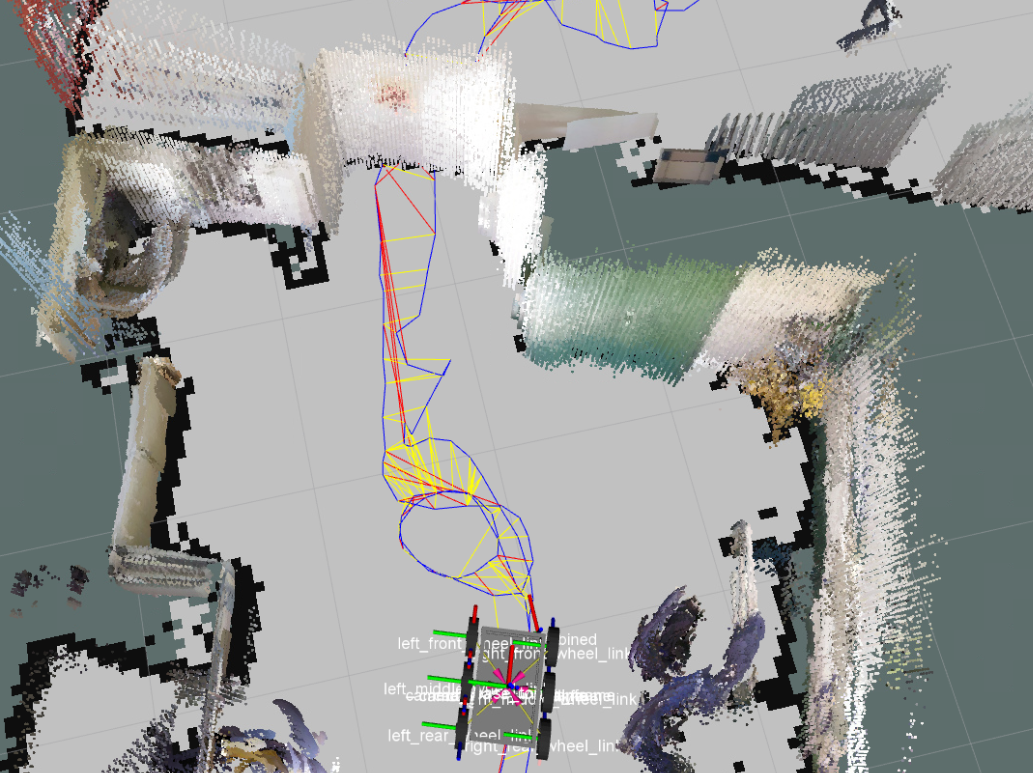
2/Question2: And the the "Map Cloud" which take info from /rtabmap/mapData and the /scan topic from laser still create separate two map. I think the different here is the Laser scanner and the kinect is not a part of the robot, I mount them on the robot and connect them directly to my Linux_Thinkpad.
Are you do the same for your azimut3 or your robot have the camera and laser scanner itself? And in my situation, how to fix this?
URL: http://official-rtab-map-forum.206.s1.nabble.com/Robot-stuck-in-it-own-footprint-tp3301p3420.html
Thank you, it work!!!
Now the robot can localization in the map use it odometry, not odometry from kinect any_more.
I have two question.
1/Question 1: when I sent the goal robot not move, topic of 2D Nav Goal is :/rtabmap/goal. And I check the rqt_graph, here the planner/move_base not have any connect with /cmd_vel, which that should be have if I use rgbd_odometry from kinect.
This is my launch files.
<launch>
<!-- Localization-only mode -->
<arg name="localization" default="false"/>
<arg if="$(arg localization)" name="rtabmap_args" default=""/>
<arg unless="$(arg localization)" name="rtabmap_args" default="--delete_db_on_start"/>
<!-- AZIMUT 3 bringup: launch motors/odometry, laser scan and openni -->
<include file="$(find volksbot_driver)launch/volksbot.launch"/>
<include file="$(find lms1xx)launch/LMS1xx.launch"/>
<include file="$(find freenect_launch)/launch/freenect.launch">
<arg name="depth_registration" value="True" />
</include>
<node pkg="tf" type="static_transform_publisher" name="camera"
args="0 0 0 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="laser"
args="0 0 0 0 0 0 base_footprint laser 100" />
<!-- SLAM (robot side) -->
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="$(arg rtabmap_args)">
<param name="frame_id" type="string" value="base_footprint"/>
<param name="subscribe_scan" type="bool" value="true"/>
<param name="use_action_for_goal" type="bool" value="true"/>
<param name="cloud_decimation" type="int" value="1"/> <!-- we already decimate in memory below -->
<param name="grid_eroded" type="bool" value="true"/>
<param name="grid_cell_size" type="double" value="0.05"/>
<remap from="odom" to="/odom"/>
<remap from="scan" to="/scan"/>
<remap from="mapData" to="mapData"/>
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/depth_registered/camera_info"/>
<remap from="goal_out" to="current_goal"/>
<remap from="move_base" to="/planner/move_base"/>
<remap from="grid_map" to="/rtabmap/grid_map"/>
<!-- RTAB-Map's parameters -->
<param name="RGBD/NeighborLinkRefining" type="string" value="true"/>
<param name="RGBD/ProximityBySpace" type="string" value="true"/>
<param name="Reg/Strategy" type="string" value="1"/>
<param name="RGBD/AngularUpdate" type="string" value="0.1"/>
<param name="RGBD/LinearUpdate" type="string" value="0.1"/>
<param name="RGBD/LocalRadius" type="string" value="5"/>
<param name="Mem/RehearsalSimilarity" type="string" value="0.45"/>
<param name="Mem/NotLinkedNodesKept" type="string" value="false"/>
<param name="Mem/ImagePostDecimation" type="string" value="4"/>
<param name="Rtabmap/StartNewMapOnLoopClosure" type="string" value="false"/>
<param name="Rtabmap/TimeThr" type="string" value="600"/>
<param name="Rtabmap/DetectionRate" type="string" value="1"/>
<param name="Bayes/PredictionLC" type="string" value="0.1 0.36 0.30 0.16 0.062 0.0151 0.00255 0.00035"/>
<param name="Optimizer/Slam2D" type="string" value="true"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="true"/>
<param name="Optimizer/Strategy" type="string" value="0"/>
<param name="Kp/DetectorStrategy" type="string" value="0"/>
<param name="Kp/MaxFeatures" type="string" value="200"/>
<param name="SURF/HessianThreshold" type="string" value="500"/>
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="Vis/MaxDepth" type="string" value="5"/>
<param name="Vis/MinInliers" type="string" value="5"/>
<param name="Icp/CorrespondenceRatio" type="string" value="0.3"/>
<!-- localization mode -->
<param if="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="false"/>
<param unless="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="true"/>
<param name="Mem/InitWMWithAllNodes" type="string" value="$(arg localization)"/>
</node>
</group>
<!-- teleop -->
<node pkg="turtlebot_teleop" type="turtlebot_teleop_key" name="turtlebot_teleop_keyboard" output="screen">
<param name="scale_linear" value="0.5" type="double"/><param name="scale_angular" value="1.5" type="double"/>
<remap from="turtlebot_teleop_keyboard/cmd_vel" to="cmd_vel"/>
</node>
<!-- ROS navigation stack move_base -->
<group ns="planner">
<remap from="odom" to="/odom"/>
<remap from="scan" to="/scan"/>
<remap from="obstacles_cloud" to="/obstacles_cloud"/>
<remap from="ground_cloud" to="/ground_cloud"/>
<remap from="map" to="/rtabmap/grid_map"/>
<remap from="move_base_simple/goal" to="/planner_goal"/>
<node pkg="move_base" type="move_base" respawn="true" name="move_base" output="screen">
<param name="base_global_planner" value="navfn/NavfnROS"/>
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/costmap_common_params_2d.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/costmap_common_params_2d.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/local_costmap_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/global_costmap_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find rtabmap_ros)/launch/azimut3/config/base_local_planner_params.yaml" command="load" />
</node>
</group>
<!-- Throttling messages -->
<group ns="camera">
<node pkg="nodelet" type="nodelet" name="data_throttle" args="load rtabmap_ros/data_throttle camera_nodelet_manager">
<param name="rate" type="double" value="5"/>
<param name="decimation" type="int" value="2"/>
<remap from="rgb/image_in" to="rgb/image_rect_color"/>
<remap from="depth/image_in" to="depth_registered/image_raw"/>
<remap from="rgb/camera_info_in" to="depth_registered/camera_info"/>
<remap from="rgb/image_out" to="data_resized_image"/>
<remap from="depth/image_out" to="data_resized_image_depth"/>
<remap from="rgb/camera_info_out" to="data_resized_camera_info"/>
</node>
<!-- for the planner -->
<node pkg="nodelet" type="nodelet" name="points_xyz_planner" args="load rtabmap_ros/point_cloud_xyz camera_nodelet_manager">
<remap from="depth/image" to="data_resized_image_depth"/>
<remap from="depth/camera_info" to="data_resized_camera_info"/>
<remap from="cloud" to="cloudXYZ" />
<param name="decimation" type="int" value="1"/> <!-- already decimated above -->
<param name="max_depth" type="double" value="3.0"/>
<param name="voxel_size" type="double" value="0.02"/>
</node>
<node pkg="nodelet" type="nodelet" name="obstacles_detection" args="load rtabmap_ros/obstacles_detection camera_nodelet_manager">
<remap from="cloud" to="cloudXYZ"/>
<remap from="obstacles" to="/obstacles_cloud"/>
<remap from="ground" to="/ground_cloud"/>
<param name="frame_id" type="string" value="base_footprint"/>
<param name="map_frame_id" type="string" value="map"/>
<param name="wait_for_transform" type="bool" value="true"/>
<param name="Grid/MinClusterSize" type="int" value="20"/>
<param name="Grid/MaxObstacleHeight" type="double" value="0.4"/>
</node>
</group>
</launch>2/Question2: And the the "Map Cloud" which take info from /rtabmap/mapData and the /scan topic from laser still create separate two map. I think the different here is the Laser scanner and the kinect is not a part of the robot, I mount them on the robot and connect them directly to my Linux_Thinkpad.
Are you do the same for your azimut3 or your robot have the camera and laser scanner itself? And in my situation, how to fix this?
| Free forum by Nabble | Edit this page |