Re: General questions about mapping and odometry
Posted by adr_arroyo on
URL: http://official-rtab-map-forum.206.s1.nabble.com/General-questions-about-mapping-and-odometry-tp3432p3456.html
Hi, thanks for the reply.
About the odometry, we thought that the robots odom was taken and then was somehow refined with those Odom/Strategies so we misunderstood that part.
We consider our odometry to be pretty good, as it comes from IMU, so the errors that appear are minimal and that is why we were surprised when the results were not so accurate in terms of odometry. For example, the first graph in "Graph view" of one test is like this:

As you can see, somehow the sw thought that we moved in two different corridors, but then graph optimization corrected the map:
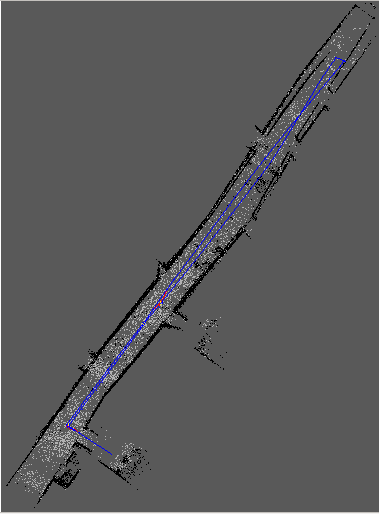
It is very well in most of the parts but at the right end of the corridor there are two walls placed. Trajetory seems more accurate from how we moved but only on the left part as the movement was first closer to the bottom wall and then closer to the upper one.
With an odom with this accurazy, how is it possible that the initial graph was so different?
Corrections are done when a loop closure is added,as I read in the paper, so my guess (and from the loop closures that I saw in the db) is that at the right part of the wall there where not detected any proximity or global loop closures so the ICP cloud not match both pcl and graph optimization placed two.
Launch
DB
Regards
----------
Edit:
My guess was right, adding more loop closure possiblities, I mean, rotating every certain meters of translating and thus having a better knowledge of the environment, helps with having more loop closures and then the graph optimization is quite better:

There are much more matches to help with the refining
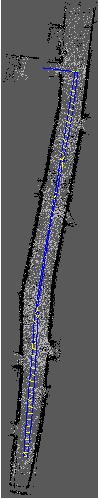
I am still not sure about the causes of this initial drift
URL: http://official-rtab-map-forum.206.s1.nabble.com/General-questions-about-mapping-and-odometry-tp3432p3456.html
Hi, thanks for the reply.
About the odometry, we thought that the robots odom was taken and then was somehow refined with those Odom/Strategies so we misunderstood that part.
We consider our odometry to be pretty good, as it comes from IMU, so the errors that appear are minimal and that is why we were surprised when the results were not so accurate in terms of odometry. For example, the first graph in "Graph view" of one test is like this:
As you can see, somehow the sw thought that we moved in two different corridors, but then graph optimization corrected the map:
It is very well in most of the parts but at the right end of the corridor there are two walls placed. Trajetory seems more accurate from how we moved but only on the left part as the movement was first closer to the bottom wall and then closer to the upper one.
With an odom with this accurazy, how is it possible that the initial graph was so different?
Corrections are done when a loop closure is added,as I read in the paper, so my guess (and from the loop closures that I saw in the db) is that at the right part of the wall there where not detected any proximity or global loop closures so the ICP cloud not match both pcl and graph optimization placed two.
Launch
DB
Regards
----------
Edit:
My guess was right, adding more loop closure possiblities, I mean, rotating every certain meters of translating and thus having a better knowledge of the environment, helps with having more loop closures and then the graph optimization is quite better:
There are much more matches to help with the refining
I am still not sure about the causes of this initial drift
| Free forum by Nabble | Edit this page |