Re: General questions about mapping and odometry
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/General-questions-about-mapping-and-odometry-tp3432p3467.html
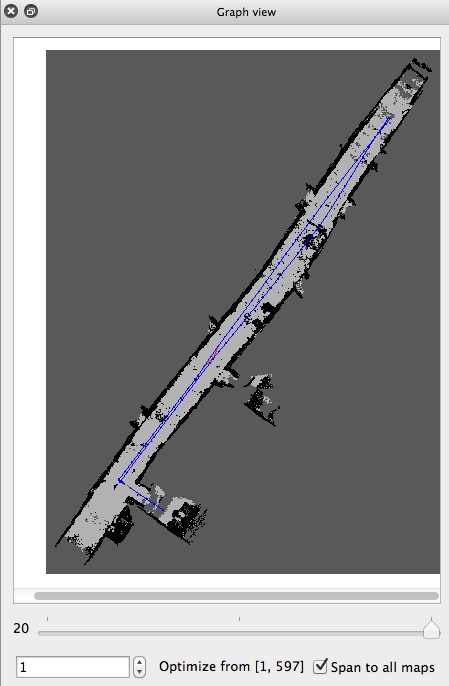
Looking at the database, some neighbor (odometry) links have very high variance set. Graph optimization will work very badly in that case. If you open the database in DatabaseViewer, then open Constraints View, you can scroll each neighbor link. Some links with really bad covariance are (IDs): 208->209, 213->214, 505->506, 545->547, 596->597. I don't know why, unless the odometry node gives these values. Can you show what looks like your odometry messages (too see if this high covariance error is coming from odometry node or rtabmap node)?
Clicking on "Refine" button fixed the problem in the database:
 ->
-> 
However, the problem seems to be the covariance set in the odometry messages. So fixing these covariances, I get those results:
Top View point cloud:
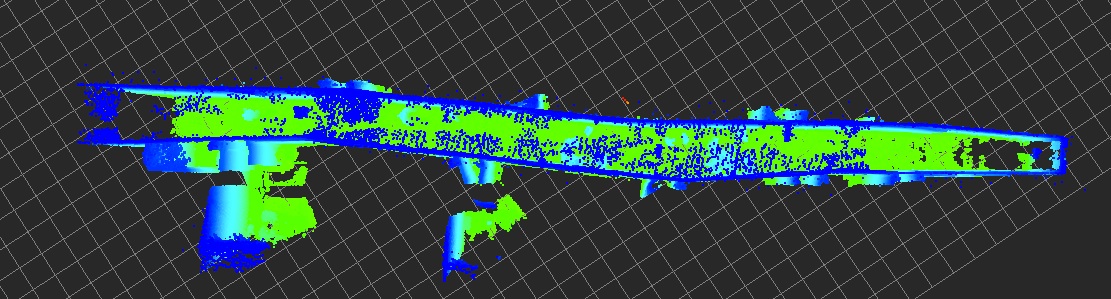
Pure odometry (is it really just IMU in your case? maybe you could use robot_localization package to do fusion with wheel encoders):

cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/General-questions-about-mapping-and-odometry-tp3432p3467.html
Looking at the database, some neighbor (odometry) links have very high variance set. Graph optimization will work very badly in that case. If you open the database in DatabaseViewer, then open Constraints View, you can scroll each neighbor link. Some links with really bad covariance are (IDs): 208->209, 213->214, 505->506, 545->547, 596->597. I don't know why, unless the odometry node gives these values. Can you show what looks like your odometry messages (too see if this high covariance error is coming from odometry node or rtabmap node)?
$ rostopic echo /my_odom_topic
Clicking on "Refine" button fixed the problem in the database:
-> However, the problem seems to be the covariance set in the odometry messages. So fixing these covariances, I get those results:
Top View point cloud:
Pure odometry (is it really just IMU in your case? maybe you could use robot_localization package to do fusion with wheel encoders):
cheers,
Mathieu
| Free forum by Nabble | Edit this page |