rtabmap + orbbec reconstrution failure
Posted by daerduocarey on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-orbbec-reconstrution-failure-tp3481.html
Hi, dear friends,
I'm newbie to rtabmap and 3d SLAM reconstruction. I encounter a problem when using rtabmap_ros + orbbec astra pro camera to reconstruct 3d map in my office.
Here are the details for my setting:
1) Devices: Turtlebot + Orbbec be Astra Pro camera
2) ROS Version: Indigo
3) rtabmap for reconsturction: ros-indigo-rtabmap-ros + demo_turtlebot_mapping.launch
Here is the result I get.
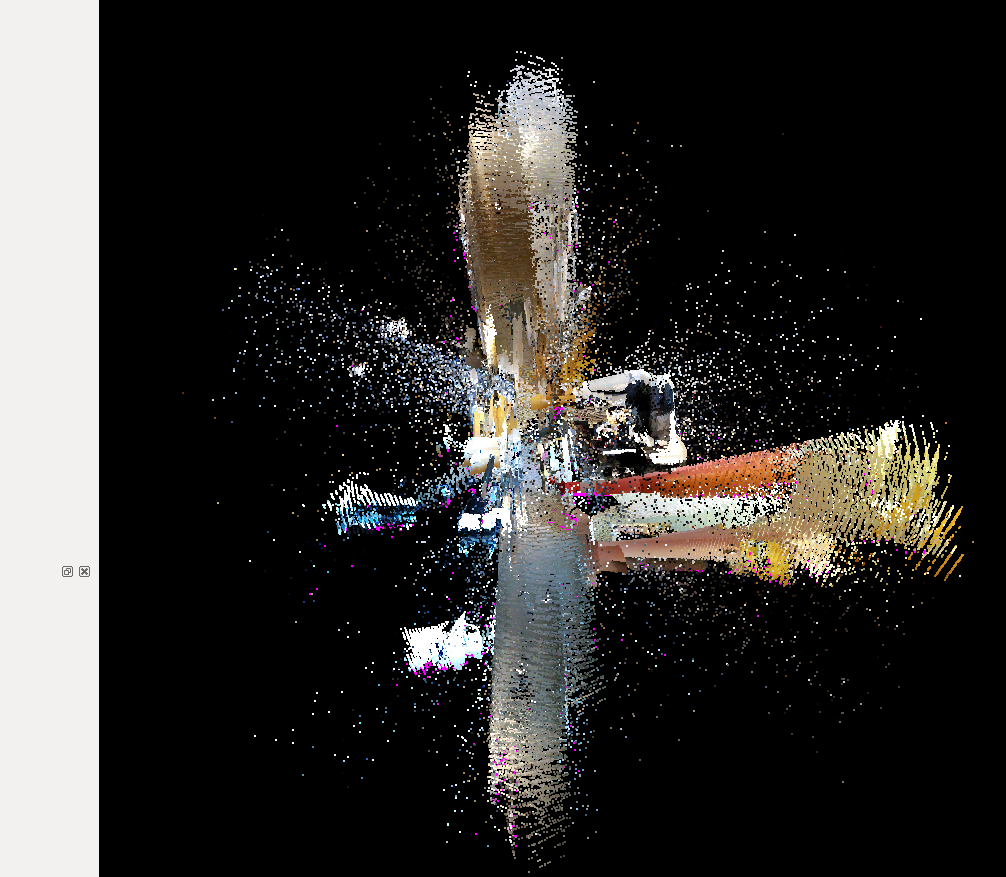
The reconstruction result is quite noisy. What should I do to get cleaner and better reconstruction?
I've uploaded by .db file here: https://drive.google.com/file/d/0B1WOOizQRMEkR2E2cUhwZ25Ibm8/view?usp=sharing
I've tried to use Tango device Rtabmap to reconstruct the same area and get much cleaner and better result. Any idea on potential problem in my turtlebot case?
Besides, I'm mounting my camera on top of the robot. Is it necessary to get the correct TF between base_link and camera_link in order to make rtabmap work properly? Does rtabmap algorithm depend on the robot odometry, since there may be odometry error due to the control precision?
And, when I tried to use rtabmap stand-alone version to detect loop closure, I get the following error:
[FATAL] DBDriverSqlite3.cpp:4970::stepKeypoint() Condition (rc == SQLITE_OK) not met! [DB error (0.11.8): bind or column index out of range]
Any idea on why this occurs?
Thank you!
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-orbbec-reconstrution-failure-tp3481.html
Hi, dear friends,
I'm newbie to rtabmap and 3d SLAM reconstruction. I encounter a problem when using rtabmap_ros + orbbec astra pro camera to reconstruct 3d map in my office.
Here are the details for my setting:
1) Devices: Turtlebot + Orbbec be Astra Pro camera
2) ROS Version: Indigo
3) rtabmap for reconsturction: ros-indigo-rtabmap-ros + demo_turtlebot_mapping.launch
Here is the result I get.
The reconstruction result is quite noisy. What should I do to get cleaner and better reconstruction?
I've uploaded by .db file here: https://drive.google.com/file/d/0B1WOOizQRMEkR2E2cUhwZ25Ibm8/view?usp=sharing
I've tried to use Tango device Rtabmap to reconstruct the same area and get much cleaner and better result. Any idea on potential problem in my turtlebot case?
Besides, I'm mounting my camera on top of the robot. Is it necessary to get the correct TF between base_link and camera_link in order to make rtabmap work properly? Does rtabmap algorithm depend on the robot odometry, since there may be odometry error due to the control precision?
And, when I tried to use rtabmap stand-alone version to detect loop closure, I get the following error:
[FATAL] DBDriverSqlite3.cpp:4970::stepKeypoint() Condition (rc == SQLITE_OK) not met! [DB error (0.11.8): bind or column index out of range]
Any idea on why this occurs?
Thank you!
| Free forum by Nabble | Edit this page |