Re: rtabmap + orbbec reconstrution failure
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-orbbec-reconstrution-failure-tp3481p3509.html
Hi,
I am using the latest version of rtabmap, but the parameters should look the same. Open Preferences->3D rendering:


With only a kinect-like sensor, don't use ICP for registration. Set Reg/Strategy to 0. Set also Vis/MinInliers to 25 to get more accurate loop closures (and reject bad ones):
Yes it is necessary to have an accurate TF between base_link and camera_link, in particular when odometry is not computed from the camera frame (e.g., robot/wheel odometry). If the TF is not accurate, the point clouds won't be correctly aligned against odometry poses.
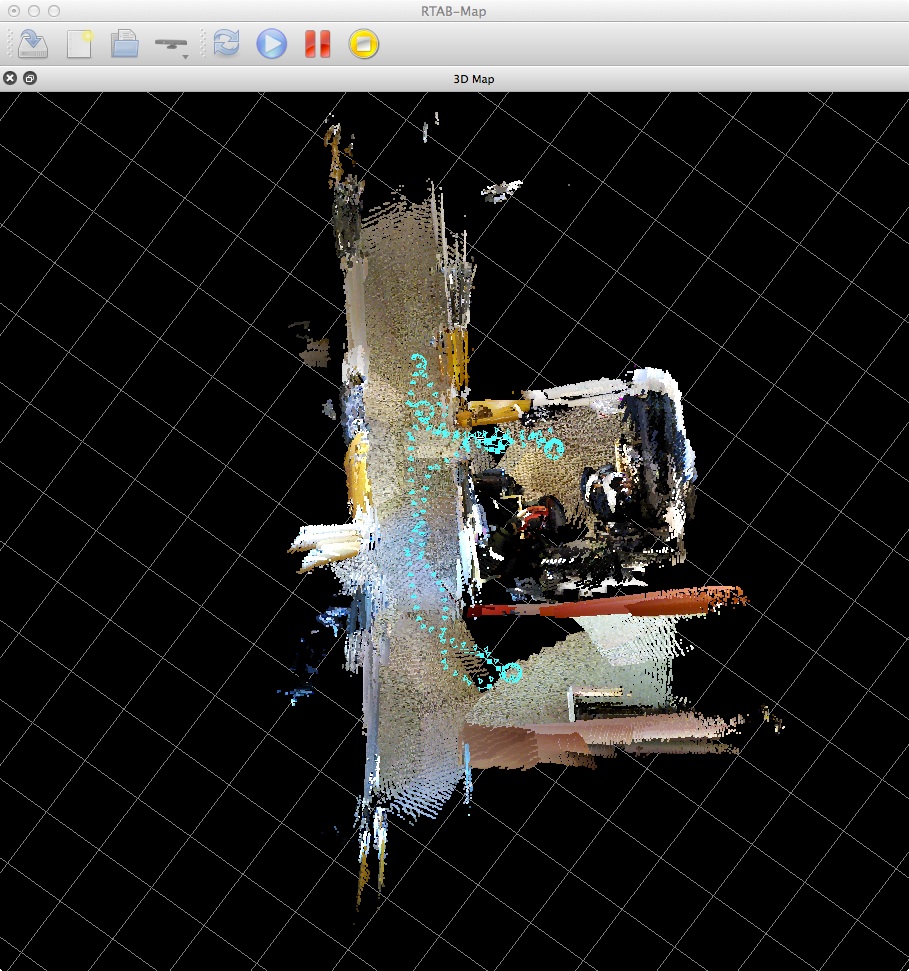
Yes, RTAB-Map depends on odometry, so there will be always some drift. The difference with Tango, is that visual inertial odometry approach of Tango may be more accurate than turtlebot wheel odometry. However, in this case I don't think the odometry of turtlebot is that bad, maybe it is just the TF between base frame and camera frame that is not accurate enough. For example, if you do a 360 degrees rotation and odometry tells you also that you did 360 degrees rotation and the point clouds are not correctly aligned, this is a TF problem between base and camera.
For the error, I didn't encountered this problem while replaying the database. If you can describe the exact steps you did with the database above, I may be able to reproduce the bug.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-orbbec-reconstrution-failure-tp3481p3509.html
Hi,
I am using the latest version of rtabmap, but the parameters should look the same. Open Preferences->3D rendering:
With only a kinect-like sensor, don't use ICP for registration. Set Reg/Strategy to 0. Set also Vis/MinInliers to 25 to get more accurate loop closures (and reject bad ones):
Yes it is necessary to have an accurate TF between base_link and camera_link, in particular when odometry is not computed from the camera frame (e.g., robot/wheel odometry). If the TF is not accurate, the point clouds won't be correctly aligned against odometry poses.
Yes, RTAB-Map depends on odometry, so there will be always some drift. The difference with Tango, is that visual inertial odometry approach of Tango may be more accurate than turtlebot wheel odometry. However, in this case I don't think the odometry of turtlebot is that bad, maybe it is just the TF between base frame and camera frame that is not accurate enough. For example, if you do a 360 degrees rotation and odometry tells you also that you did 360 degrees rotation and the point clouds are not correctly aligned, this is a TF problem between base and camera.
For the error, I didn't encountered this problem while replaying the database. If you can describe the exact steps you did with the database above, I may be able to reproduce the bug.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |