Re: RGBD + Lidar for SLAM and autonomous navigation
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGBD-Lidar-for-SLAM-and-autonomous-navigation-tp3511p3526.html
Hi,
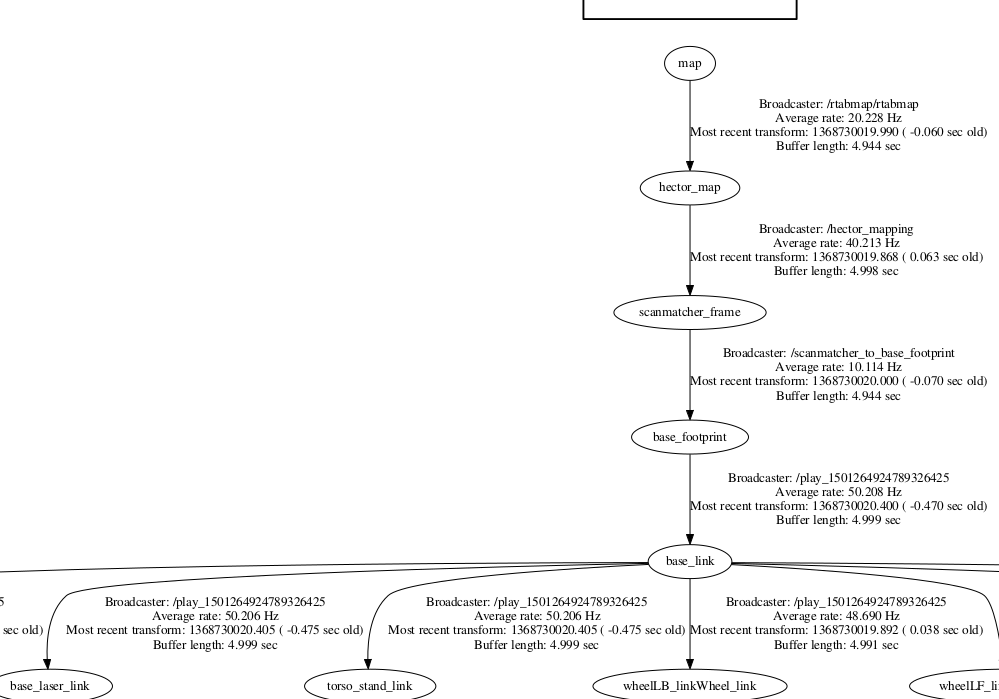
According to this post, hector_mapping will publish /hector_map -> /scanmatcher_frame. rtabmap will publish /map -> /scanmatcher_frame. In the log where rtabmap is started, there should be more log messages from rtabmap, is this the complete log? If rtabmap doesn't receive any inputs, it should output warnings on the terminal (on ros kinetic or latest source version).
Here is the tf tree with demo_hector_mapping.launch:
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGBD-Lidar-for-SLAM-and-autonomous-navigation-tp3511p3526.html
Hi,
According to this post, hector_mapping will publish /hector_map -> /scanmatcher_frame. rtabmap will publish /map -> /scanmatcher_frame. In the log where rtabmap is started, there should be more log messages from rtabmap, is this the complete log? If rtabmap doesn't receive any inputs, it should output warnings on the terminal (on ros kinetic or latest source version).
Here is the tf tree with demo_hector_mapping.launch:
$ roslaunch rtabmap_ros demo_hector_mapping.launch $ rosbag play --clock demo_mapping_no_odom.bag $ rosrun tf view_frames
cheers,
Mathieu
| Free forum by Nabble | Edit this page |