Re: RGBD + Lidar for SLAM and autonomous navigation
Posted by Blupon on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGBD-Lidar-for-SLAM-and-autonomous-navigation-tp3511p3555.html
Hi !
First of all, the failure to launch rtabmap seems to be due to one boolean in the demo_hector_mapping.launch:
use_sim_time should be set to False, and not True, as it is with the launch file available on the wiki tutorial page.
After correcting the use_sim_time boolean, I could see a strange difference when launching rtabmap on Indigo and Kinetic using:
- the same modified demo_hector_mapping.launch
- the same URDF descriptor
- the same launch file for the URDF/robot description with robot_state_publisher
- the same launching sequence:
1. roslaunch openni2_launch openni2.launch depth_registration:=true
2. rosrun urg_node urg_node
3. roslaunch erl_ugv_description beta.launch
4. roslaunch rtabmap_ros demo_hector_mapping.launch rtabmap_args:="--delete_db_on_start" rviz:=false rtabmapviz:=false
rtabmap launch complete log here
We get:
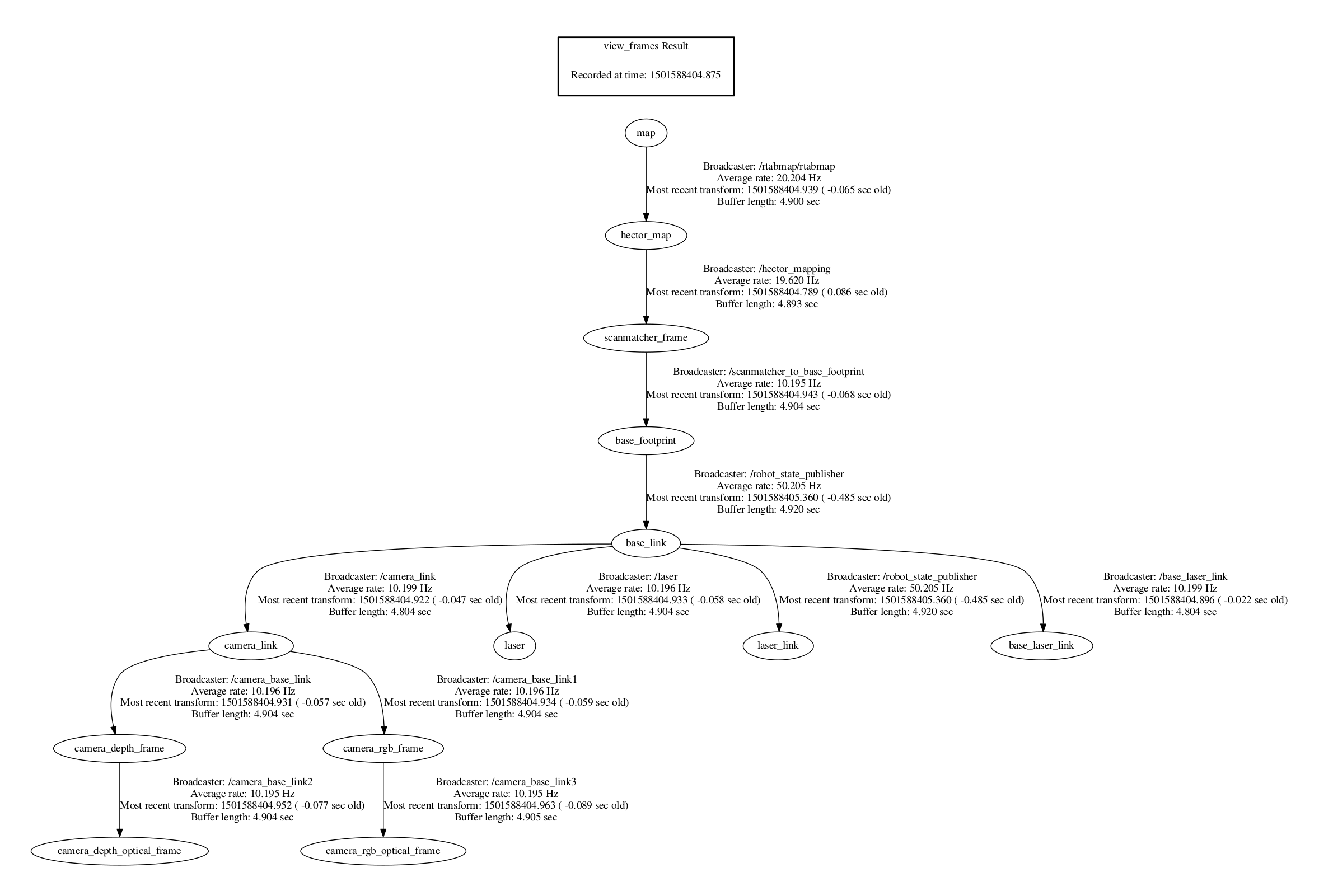
- [GOOD] the expected tf tree using the command line view_frames (see image below)
- [BAD] a lack of topics we get in Kinetic, including /rtabmap/cloud_ground and /rtabmap/cloud_obstacles. I thought those would need a dedicated nodelet launch in the demo_hector_mapping.launch (like the one you suggest here), but it doesn't since on Kinetic those topics are published without any addition to RTABMap launch file.
complete rtabmap launch log here
We get:
- [GOOD] topics we couldn't get in Indigo, including /rtabmap/cloud_ground and /rtabmap/cloud_obstacles
- [BAD] a totally wrong (and unexpected) tf tree thanks to the command line view_frames (see image below). I say unexpected because the link between /base_footprint and /base_link is defined by the URDF and does work/exist on the Indigo computer trial.

The only other difference I can think of is an error associated with joint_state_publisher dying for some reason when I launch beta.launch, responsible for the robot description (but again, this shouldn't be a real issue according to this ROS Q&A). I only get this error on the Indigo laptop, not on Kinetic (where the tf tree is wrong).
- How to check that RTABMap actually uses lidar odometry to build its map ?
- I could read several [INFO] [ <TIME> ]: Creating 1 swatches shell messages when RTABMap was running, what does that mean ?
- According to your first answer, RTABMap could not work the same way depending on the ROS distribution in use, where can I find details about those possible differences ? (especially between Indigo and Kinetic in my case )
)
Thanks for your dedication & answers !
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGBD-Lidar-for-SLAM-and-autonomous-navigation-tp3511p3555.html
Hi !
RTABMap launching fix
First of all, the failure to launch rtabmap seems to be due to one boolean in the demo_hector_mapping.launch:
use_sim_time should be set to False, and not True, as it is with the launch file available on the wiki tutorial page.
Wrong TF tree in view_frames on Kinetic, but not Indigo
After correcting the use_sim_time boolean, I could see a strange difference when launching rtabmap on Indigo and Kinetic using:
- the same modified demo_hector_mapping.launch
- the same URDF descriptor
- the same launch file for the URDF/robot description with robot_state_publisher
- the same launching sequence:
1. roslaunch openni2_launch openni2.launch depth_registration:=true
2. rosrun urg_node urg_node
3. roslaunch erl_ugv_description beta.launch
4. roslaunch rtabmap_ros demo_hector_mapping.launch rtabmap_args:="--delete_db_on_start" rviz:=false rtabmapviz:=false
Results for Indigo
rtabmap launch complete log here
We get:
- [GOOD] the expected tf tree using the command line view_frames (see image below)
- [BAD] a lack of topics we get in Kinetic, including /rtabmap/cloud_ground and /rtabmap/cloud_obstacles. I thought those would need a dedicated nodelet launch in the demo_hector_mapping.launch (like the one you suggest here), but it doesn't since on Kinetic those topics are published without any addition to RTABMap launch file.
Results for Kinetic
complete rtabmap launch log here
We get:
- [GOOD] topics we couldn't get in Indigo, including /rtabmap/cloud_ground and /rtabmap/cloud_obstacles
- [BAD] a totally wrong (and unexpected) tf tree thanks to the command line view_frames (see image below). I say unexpected because the link between /base_footprint and /base_link is defined by the URDF and does work/exist on the Indigo computer trial.
The only other difference I can think of is an error associated with joint_state_publisher dying for some reason when I launch beta.launch, responsible for the robot description (but again, this shouldn't be a real issue according to this ROS Q&A). I only get this error on the Indigo laptop, not on Kinetic (where the tf tree is wrong).
Additional question
- How to check that RTABMap actually uses lidar odometry to build its map ?
- I could read several [INFO] [ <TIME> ]: Creating 1 swatches shell messages when RTABMap was running, what does that mean ?
- According to your first answer, RTABMap could not work the same way depending on the ROS distribution in use, where can I find details about those possible differences ? (especially between Indigo and Kinetic in my case
)
Thanks for your dedication & answers !
| Free forum by Nabble | Edit this page |