Re: rtabmap_ros jetson tx2 and zed camera launch issue
Posted by abmros1 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-jetson-tx2-and-zed-camera-launch-issue-tp3625p3655.html
Hi Mathieu,
Thanks for the quick response. I follow instructions in your reply and build rtabmap against OpenCV3. This time it gives me a somewhat different error:
[ INFO] [1503075754.223977172]: Parameters successfully read.
OpenCV Error: The function/feature is not implemented (Unknown/unsupported array type) in type, file /tmp/binarydeb/ros-kinetic-opencv3-3.2.0/modules/core/src/matrix.cpp, line 1931
terminate called after throwing an instance of 'cv::Exception'
what(): /tmp/binarydeb/ros-kinetic-opencv3-3.2.0/modules/core/src/matrix.cpp:1931: error: (-213) Unknown/unsupported array type in function type
[rtabmap/rgbd_odometry-1] process has died [pid 30929, exit code -6, cmd /home/nvidia/catkin_ws/devel/lib/rtabmap_ros/rgbd_odometry --delete_db_on_start rgb/image:=/camera/rgb/image_rect_color depth/image:=/camera/depth/depth_registered rgb/camera_info:=/camera/rgb/camera_info rgbd_image:=/camera/rgbd_image __name:=rgbd_odometry __log:=/home/nvidia/.ros/log/c45555f8-842f-11e7-87b5-00044b8c57b4/rtabmap-rgbd_odometry-1.log].
log file: /home/nvidia/.ros/log/c45555f8-842f-11e7-87b5-00044b8c57b4/rtabmap-rgbd_odometry-1*.log
[ INFO] [1503075755.002151224]: /rtabmap/rtabmapviz: queue_size = 10
[ INFO] [1503075755.002279320]: /rtabmap/rtabmapviz: rgbd_cameras = 1
[ INFO] [1503075755.002322328]: /rtabmap/rtabmapviz: approx_sync = false
[ INFO] [1503075755.002401400]: Setup depth callback
[ INFO] [1503075755.381619268]:
/rtabmap/rtabmapviz subscribed to (exact sync):
/rtabmap/odom,
/camera/rgb/image_rect_color,
/camera/depth/depth_registered,
/camera/rgb/camera_info,
/rtabmap/odom_info
I am not sure this is OpenCv issue or not. My camera topics are published :
rostopic hz /camera/rgb/image_rect_color
subscribed to [/camera/rgb/image_rect_color]
average rate: 94.827
min: 0.006s max: 0.017s std dev: 0.00190s window: 90
average rate: 95.385
min: 0.006s max: 0.017s std dev: 0.00179s window: 186
average rate: 94.900
min: 0.006s max: 0.025s std dev: 0.00203s window: 280
rostopic hz /camera/depth/depth_registered
subscribed to [/camera/depth/depth_registered]
average rate: 40.641
min: 0.020s max: 0.033s std dev: 0.00232s window: 38
average rate: 44.054
min: 0.017s max: 0.033s std dev: 0.00327s window: 85
average rate: 47.592
rostopic hz /camera/rgb/camera_info
subscribed to [/camera/rgb/camera_info]
average rate: 40.013
min: 0.021s max: 0.030s std dev: 0.00251s window: 39
average rate: 41.023
min: 0.016s max: 0.033s std dev: 0.00314s window: 81
average rate: 42.166
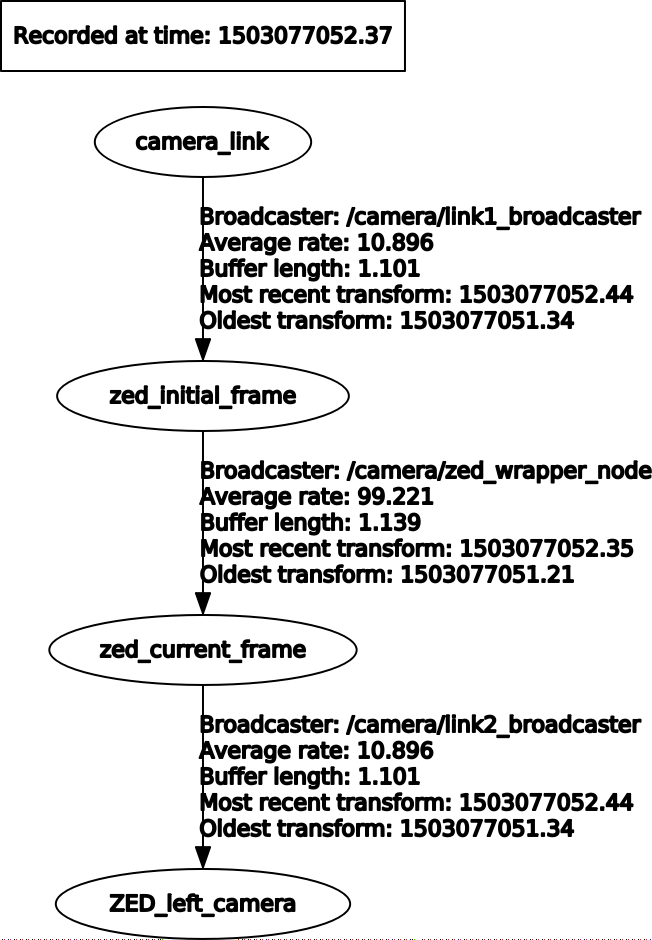
And my transform tree looks like this:
Could you give some additional insights to what my problem is?
Thanks,
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-ros-jetson-tx2-and-zed-camera-launch-issue-tp3625p3655.html
Hi Mathieu,
Thanks for the quick response. I follow instructions in your reply and build rtabmap against OpenCV3. This time it gives me a somewhat different error:
[ INFO] [1503075754.223977172]: Parameters successfully read.
OpenCV Error: The function/feature is not implemented (Unknown/unsupported array type) in type, file /tmp/binarydeb/ros-kinetic-opencv3-3.2.0/modules/core/src/matrix.cpp, line 1931
terminate called after throwing an instance of 'cv::Exception'
what(): /tmp/binarydeb/ros-kinetic-opencv3-3.2.0/modules/core/src/matrix.cpp:1931: error: (-213) Unknown/unsupported array type in function type
[rtabmap/rgbd_odometry-1] process has died [pid 30929, exit code -6, cmd /home/nvidia/catkin_ws/devel/lib/rtabmap_ros/rgbd_odometry --delete_db_on_start rgb/image:=/camera/rgb/image_rect_color depth/image:=/camera/depth/depth_registered rgb/camera_info:=/camera/rgb/camera_info rgbd_image:=/camera/rgbd_image __name:=rgbd_odometry __log:=/home/nvidia/.ros/log/c45555f8-842f-11e7-87b5-00044b8c57b4/rtabmap-rgbd_odometry-1.log].
log file: /home/nvidia/.ros/log/c45555f8-842f-11e7-87b5-00044b8c57b4/rtabmap-rgbd_odometry-1*.log
[ INFO] [1503075755.002151224]: /rtabmap/rtabmapviz: queue_size = 10
[ INFO] [1503075755.002279320]: /rtabmap/rtabmapviz: rgbd_cameras = 1
[ INFO] [1503075755.002322328]: /rtabmap/rtabmapviz: approx_sync = false
[ INFO] [1503075755.002401400]: Setup depth callback
[ INFO] [1503075755.381619268]:
/rtabmap/rtabmapviz subscribed to (exact sync):
/rtabmap/odom,
/camera/rgb/image_rect_color,
/camera/depth/depth_registered,
/camera/rgb/camera_info,
/rtabmap/odom_info
I am not sure this is OpenCv issue or not. My camera topics are published :
rostopic hz /camera/rgb/image_rect_color
subscribed to [/camera/rgb/image_rect_color]
average rate: 94.827
min: 0.006s max: 0.017s std dev: 0.00190s window: 90
average rate: 95.385
min: 0.006s max: 0.017s std dev: 0.00179s window: 186
average rate: 94.900
min: 0.006s max: 0.025s std dev: 0.00203s window: 280
rostopic hz /camera/depth/depth_registered
subscribed to [/camera/depth/depth_registered]
average rate: 40.641
min: 0.020s max: 0.033s std dev: 0.00232s window: 38
average rate: 44.054
min: 0.017s max: 0.033s std dev: 0.00327s window: 85
average rate: 47.592
rostopic hz /camera/rgb/camera_info
subscribed to [/camera/rgb/camera_info]
average rate: 40.013
min: 0.021s max: 0.030s std dev: 0.00251s window: 39
average rate: 41.023
min: 0.016s max: 0.033s std dev: 0.00314s window: 81
average rate: 42.166
And my transform tree looks like this:
Could you give some additional insights to what my problem is?
Thanks,
| Free forum by Nabble | Edit this page |