Re: Error when trying to run Rtabmap version ROS
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-when-trying-to-run-Rtabmap-version-ROS-tp179p377.html
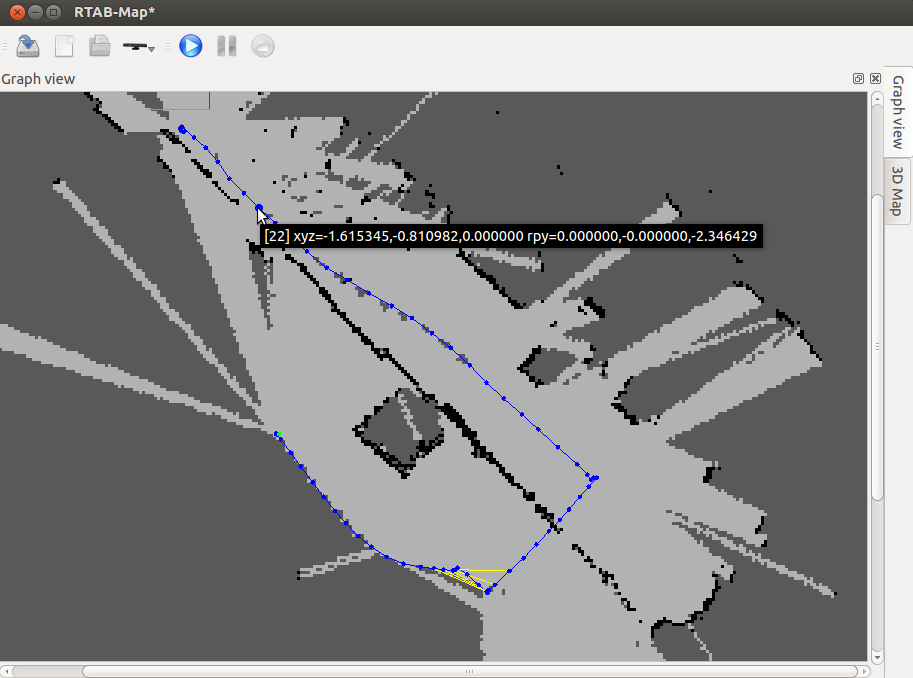
I think the Localization button is not what you are looking for. To just "see" the values of the trajectory, in rtabmapviz, open the Graph View (Menu Window -> Show view... -> Graph view). Put the mouse over a node to show the tooltip with the coordinate of the node.
To "save" the trajectory coordinates, you have two options:
1) In ROS, you can look in the "/rtabmap/graph" (rtabmap_ros/Graph) msg sent by rtabmap. Create a node to subscribe and save the values, or use rostopic to show the message and copy paste what you want.
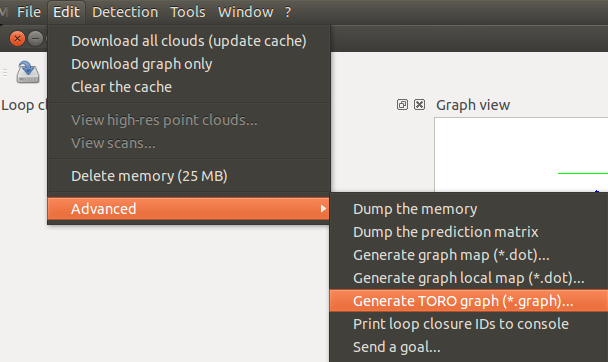
2) Open the database in the standalone rtabmap, and select "Generate TORO graph..." in the menu Edit->Advanced. Select "Global graph optimized" for poses with loop closure corrections and "Global graph not optimized" for raw poses (i.e. odometry poses). For an example of TORO output, see the Kinect mapping tutorial under "Export TORO graph" section.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Error-when-trying-to-run-Rtabmap-version-ROS-tp179p377.html
I think the Localization button is not what you are looking for. To just "see" the values of the trajectory, in rtabmapviz, open the Graph View (Menu Window -> Show view... -> Graph view). Put the mouse over a node to show the tooltip with the coordinate of the node.
To "save" the trajectory coordinates, you have two options:
1) In ROS, you can look in the "/rtabmap/graph" (rtabmap_ros/Graph) msg sent by rtabmap. Create a node to subscribe and save the values, or use rostopic to show the message and copy paste what you want.
$ rostopic echo /rtabmap/graph Only the poses: $ rostopic echo /rtabmap/graph/poses Only the ids: rostopic echo /rtabmap/graph/nodeIds
2) Open the database in the standalone rtabmap, and select "Generate TORO graph..." in the menu Edit->Advanced. Select "Global graph optimized" for poses with loop closure corrections and "Global graph not optimized" for raw poses (i.e. odometry poses). For an example of TORO output, see the Kinect mapping tutorial under "Export TORO graph" section.
$ rtabmap
| Free forum by Nabble | Edit this page |