The problem with constructing a map with two kinetics 2.0
Posted by baltic on
URL: http://official-rtab-map-forum.206.s1.nabble.com/The-problem-with-constructing-a-map-with-two-kinetics-2-0-tp3909.html
Hello,
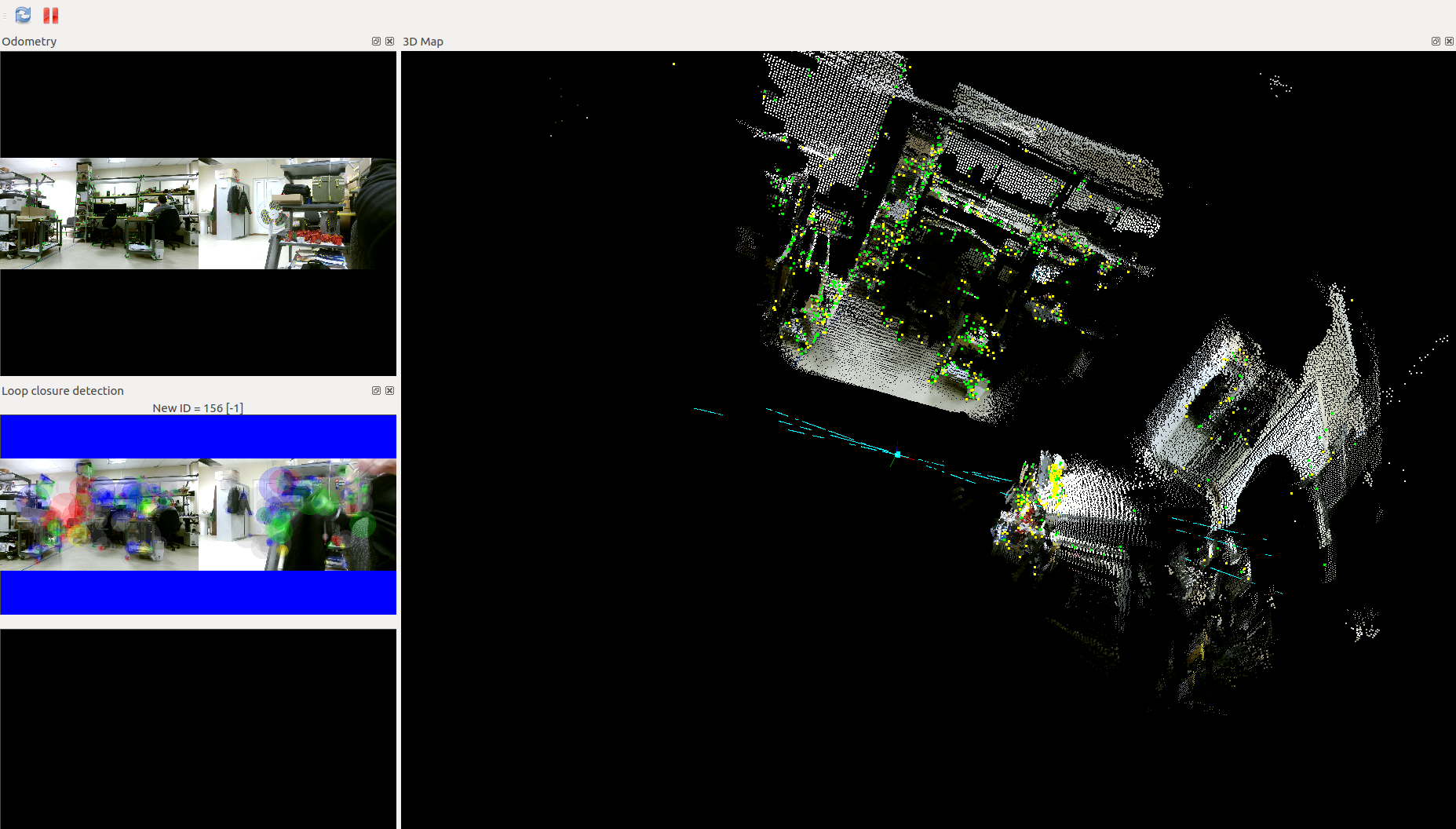
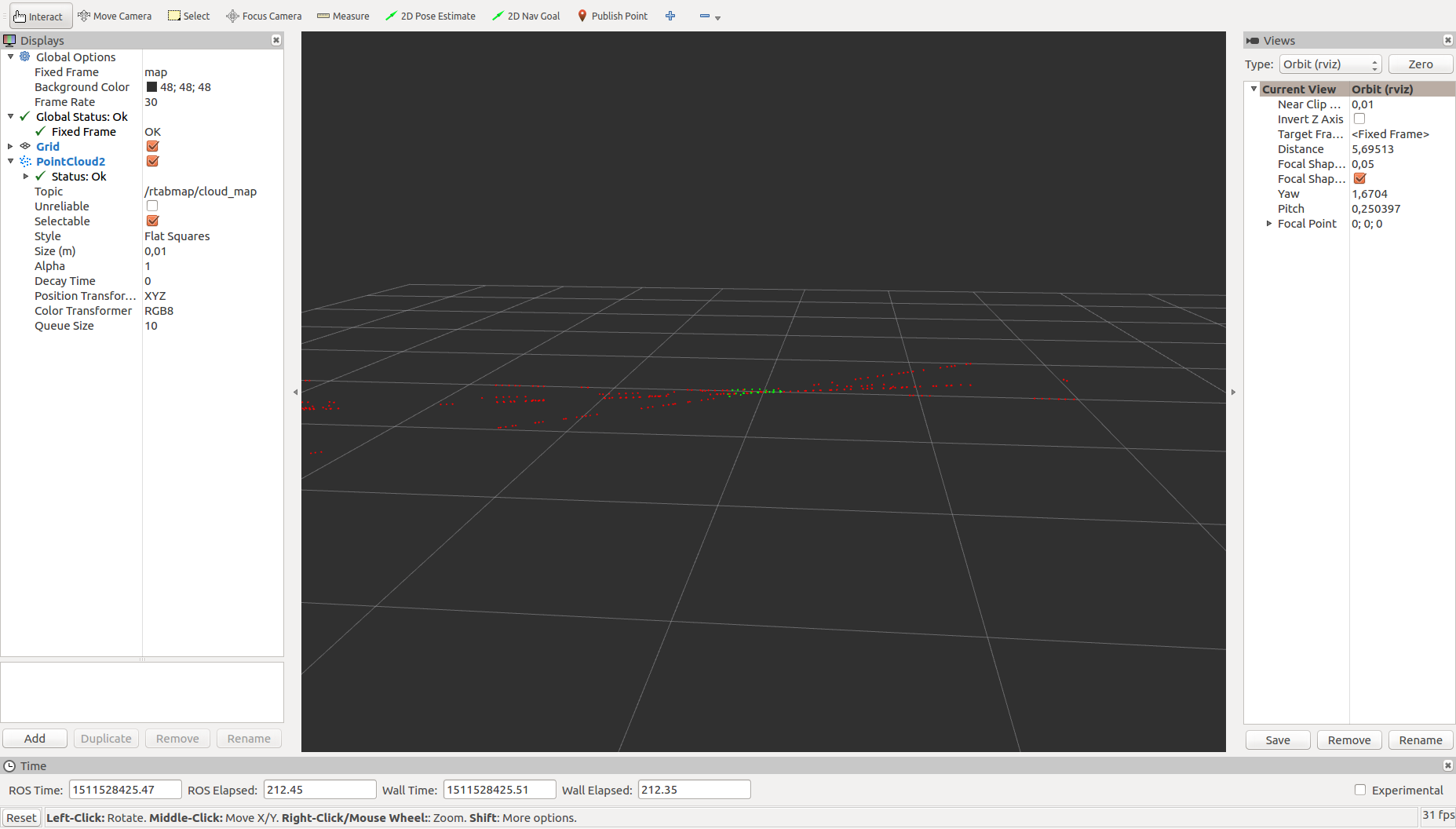
I'm trying to run Rtabmap SLAM using two kinetics 2.0. Both sensors and rtab visual odometry work correctly, but instead of a 3D map I get a few incomprehensible stripes of pixels passing through the position of one of the cameras. However, Rtabmap does not report errors.
I'm using the latest version of rtabmap and rtabmap_ros downloaded from github.
Kinect and rtab settings files are in the application
two_kin.launch
2_kinect2_bridge_1.launch
2_kinect2_bridge_2.launch
URL: http://official-rtab-map-forum.206.s1.nabble.com/The-problem-with-constructing-a-map-with-two-kinetics-2-0-tp3909.html
Hello,
I'm trying to run Rtabmap SLAM using two kinetics 2.0. Both sensors and rtab visual odometry work correctly, but instead of a 3D map I get a few incomprehensible stripes of pixels passing through the position of one of the cameras. However, Rtabmap does not report errors.
I'm using the latest version of rtabmap and rtabmap_ros downloaded from github.
Kinect and rtab settings files are in the application
two_kin.launch
2_kinect2_bridge_1.launch
2_kinect2_bridge_2.launch
| Free forum by Nabble | Edit this page |