Mapping performance and hallway problems with Kinect 2
Posted by Wezza on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Mapping-performance-and-hallway-problems-with-Kinect-2-tp3956.html
Hi!
I work with Ubuntu 16.04, ROS Kinetic and a Kinect 2 (for XBox One) sensor on an self-made mobile robot without odometry, that's the reason why I have to use visual_odometry.
I am using remote mapping (http://wiki.ros.org/rtabmap_ros/Tutorials/RemoteMapping) to transport the data from a laptop attached to the robot to my PC via WLAN. It is a little bit laggy, but generally it works (not even close to this... https://www.youtube.com/watch?v=Bh8WZsU4YC8).
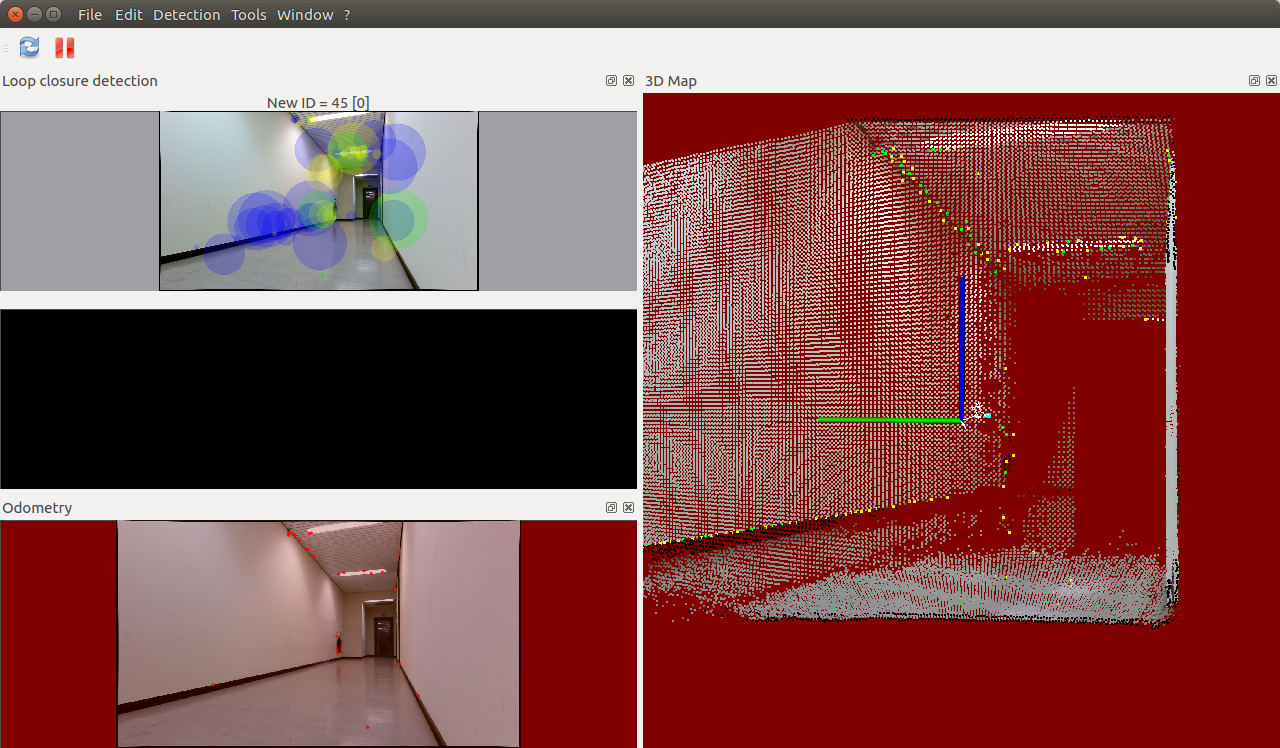
RTABMAP works well in my lab with different kinds of objects. But now i have a problem. I want the robot to leave the lab and enter the hallway to build a map from the entire floor. The hallway (20m x 3m) is relatively empty with white walls. The Kinect therefore recognizes only very few points for visual_odometry and my odomtery is lost (red screen).
-
My final goal is to create a big map from several small maps.
My questions are:
1.) Is there a way to map the hallway with the Kinect sensor?
2.) Is there a way to improve the remote mapping performance?
Technical Details laptop: Core i7-4500U CPU @ 1.80 GHz x 4, 8GB RAM, Intel integrated graphics card, SSD.
Technical details PC: Core i5-3470 CPU @ 3.20 GHz x 4, 8GB RAM, GeForce 8400GS/PCIe/SSE2, HDD.
And this is my launchfile for rtabmap_ros:
URL: http://official-rtab-map-forum.206.s1.nabble.com/Mapping-performance-and-hallway-problems-with-Kinect-2-tp3956.html
Hi!
I work with Ubuntu 16.04, ROS Kinetic and a Kinect 2 (for XBox One) sensor on an self-made mobile robot without odometry, that's the reason why I have to use visual_odometry.
I am using remote mapping (http://wiki.ros.org/rtabmap_ros/Tutorials/RemoteMapping) to transport the data from a laptop attached to the robot to my PC via WLAN. It is a little bit laggy, but generally it works (not even close to this... https://www.youtube.com/watch?v=Bh8WZsU4YC8).
RTABMAP works well in my lab with different kinds of objects. But now i have a problem. I want the robot to leave the lab and enter the hallway to build a map from the entire floor. The hallway (20m x 3m) is relatively empty with white walls. The Kinect therefore recognizes only very few points for visual_odometry and my odomtery is lost (red screen).
-
My final goal is to create a big map from several small maps.
My questions are:
1.) Is there a way to map the hallway with the Kinect sensor?
2.) Is there a way to improve the remote mapping performance?
Technical Details laptop: Core i7-4500U CPU @ 1.80 GHz x 4, 8GB RAM, Intel integrated graphics card, SSD.
Technical details PC: Core i5-3470 CPU @ 3.20 GHz x 4, 8GB RAM, GeForce 8400GS/PCIe/SSE2, HDD.
And this is my launchfile for rtabmap_ros:
<launch> <!-- Convenience launch file to launch odometry, rtabmap and rtabmapviz nodes at once --> <!-- For stereo:=false Your RGB-D sensor should be already started with "depth_registration:=true". Examples: $ roslaunch freenect_launch freenect.launch depth_registration:=true $ roslaunch openni2_launch openni2.launch depth_registration:=true --> <!-- For stereo:=true Your camera should be calibrated and publishing rectified left and right images + corresponding camera_info msgs. You can use stereo_image_proc for image rectification. Example: $ roslaunch rtabmap_ros bumblebee.launch --> <!-- Choose between RGB-D and stereo --> <arg name="stereo" default="false"/> <!-- Choose visualization --> <arg name="rtabmapviz" default="true" /> <arg name="rviz" default="false" /> <!-- Localization-only mode --> <arg name="localization" default="false"/> <!-- sim time for convenience, if playing a rosbag --> <arg name="use_sim_time" default="false"/> <param if="$(arg use_sim_time)" name="use_sim_time" value="true"/> <!-- Corresponding config files --> <arg name="cfg" default="" /> <!-- To change RTAB-Map's parameters, set the path of config file (*.ini) generated by the standalone app --> <arg name="gui_cfg" default="~/.ros/rtabmap_gui.ini" /> <arg name="rviz_cfg" default="$(find rtabmap_ros)/launch/config/rgbd.rviz" /> <arg name="frame_id" default="camera_link"/> <!-- Fixed frame id, you may set "base_link" or "base_footprint" if they are published --> <arg name="odom_frame_id" default=""/> <!-- If set, TF is used to get odometry instead of the topic --> <arg name="map_frame_id" default="map"/> <arg name="ground_truth_frame_id" default=""/> <!-- e.g., "world" --> <arg name="ground_truth_base_frame_id" default=""/> <!-- e.g., "tracker", a fake frame matching the frame "frame_id" (but on different TF tree) --> <arg name="namespace" default="rtabmap"/> <arg name="database_path" default="~/.ros/rtabmap.db"/> <arg name="queue_size" default="10"/> <!-- Default is 10 --> <arg name="wait_for_transform" default="0.2"/> <arg name="args" default=""/> <!-- delete_db_on_start, udebug --> <arg name="rtabmap_args" default="$(arg args)"/> <!-- deprecated, use "args" argument --> <arg name="launch_prefix" default=""/> <!-- for debugging purpose, it fills launch-prefix tag of the nodes --> <arg name="output" default="screen"/> <!--Control node output (screen or log)--> <!-- if timestamps of the input topics are synchronized using approximate or exact time policy--> <arg if="$(arg stereo)" name="approx_sync" default="false"/> <arg unless="$(arg stereo)" name="approx_sync" default="true"/> <!-- RGB-D related topics --> <arg name="rgb_topic" default="/camera/rgb/image_rect_color" /> <arg name="depth_topic" default="/camera/depth_registered/image_raw" /> <arg name="camera_info_topic" default="/camera/rgb/camera_info" /> <!-- stereo related topics --> <arg name="stereo_namespace" default="/stereo_camera"/> <arg name="left_image_topic" default="$(arg stereo_namespace)/left/image_rect_color" /> <arg name="right_image_topic" default="$(arg stereo_namespace)/right/image_rect" /> <!-- using grayscale image for efficiency --> <arg name="left_camera_info_topic" default="$(arg stereo_namespace)/left/camera_info" /> <arg name="right_camera_info_topic" default="$(arg stereo_namespace)/right/camera_info" /> <!-- Already synchronized RGB-D related topic, with rtabmap_ros/rgbd_sync nodelet --> <arg name="subscribe_rgbd" default="false"/> <arg name="rgbd_topic" default="/camera/rgbd_image" /> <arg name="compressed" default="false"/> <!-- If you want to subscribe to compressed image topics --> <arg name="rgb_image_transport" default="compressed"/> <!-- Common types: compressed, theora (see "rosrun image_transport list_transports") --> <arg name="depth_image_transport" default="compressedDepth"/> <!-- Common types: compressed, theora (see "rosrun image_transport list_transports") --> <arg name="subscribe_scan" default="false"/> <arg name="scan_topic" default="/scan"/> <arg name="subscribe_scan_cloud" default="false"/> <arg name="scan_cloud_topic" default="/scan_cloud"/> <arg name="scan_normal_k" default="0"/> <arg name="visual_odometry" default="true"/> <!-- Launch rtabmap visual odometry node --> <arg name="odom_topic" default="/odom"/> <!-- Odometry topic used if visual_odometry is false --> <arg name="vo_frame_id" default="odom"/> <arg name="odom_tf_angular_variance" default="1"/> <!-- If TF is used to get odometry, this is the default angular variance --> <arg name="odom_tf_linear_variance" default="1"/> <!-- If TF is used to get odometry, this is the default linear variance --> <arg name="odom_args" default="$(arg rtabmap_args)"/> <arg name="odom_sensor_sync" default="false"/> <arg name="subscribe_user_data" default="false"/> <!-- user data synchronized subscription --> <arg name="user_data_topic" default="/user_data"/> <arg name="user_data_async_topic" default="/user_data_async" /> <!-- user data async subscription (rate should be lower than map update rate) --> <!-- These arguments should not be modified directly, see referred topics without "_relay" suffix above --> <arg if="$(arg compressed)" name="rgb_topic_relay" default="$(arg rgb_topic)_relay"/> <arg unless="$(arg compressed)" name="rgb_topic_relay" default="$(arg rgb_topic)"/> <arg if="$(arg compressed)" name="depth_topic_relay" default="$(arg depth_topic)_relay"/> <arg unless="$(arg compressed)" name="depth_topic_relay" default="$(arg depth_topic)"/> <arg if="$(arg compressed)" name="left_image_topic_relay" default="$(arg left_image_topic)_relay"/> <arg unless="$(arg compressed)" name="left_image_topic_relay" default="$(arg left_image_topic)"/> <arg if="$(arg compressed)" name="right_image_topic_relay" default="$(arg right_image_topic)_relay"/> <arg unless="$(arg compressed)" name="right_image_topic_relay" default="$(arg right_image_topic)"/> <!-- Changed Parameters for better performance --> <!-- ODOMETRY MAIN ARGUMENTS: -"strategy" : Strategy: Frame-to-Map 1=Frame-To-Frame -"feature" : Feature type: 0=SURF 1=SIFT 2=ORB 3=FAST/FREAK 4=FAST/BRIEF 5=GFTT/FREAK 6=GFTT/BRIEF 7=BRISK -"nn" : Nearest neighbor strategy : 0=Linear, 1=FLANN_KDTREE, 2=FLANN_LSH, 3=BRUTEFORCE Set to 1 for float descriptor like SIFT/SURF Set to 3 for binary descriptor like ORB/FREAK/BRIEF/BRISK -"max_depth" : Maximum features depth (m) -"min_inliers" : Minimum visual correspondences to accept a transformation (m) -"inlier_distance" : RANSAC maximum inliers distance (m) -"local_map" : Local map size: number of unique features to keep track -"odom_info_data" : Fill odometry info messages with inliers/outliers data. --> <!-- Default 0 Comment: --> <arg name="strategy" default="1" /> <!-- Default 6 Comment: --> <arg name="feature" default="6" /> <!-- Default 3 Comment: --> <arg name="nn" default="3" /> <!-- Default 10 Comment: --> <arg name="max_depth" default="10" /> <!-- Default 20 Comment: --> <arg name="min_inliers" default="20" /> <!-- Default 0.02 Comment: --> <arg name="inlier_distance" default="0.02" /> <!-- Default 1000 Comment: --> <arg name="local_map" default="1000" /> <!-- Default 1000 Comment: --> <arg name="gftt_max_corners" default="1000" /> <!-- Default 7 Comment: --> <arg name="gftt_min_distance" default="7" /> <!-- End of changed Parameters for better performance --> <!-- Nodes --> <group ns="$(arg namespace)"> <!-- RGB-D Odometry --> <group unless="$(arg stereo)"> <node if="$(arg compressed)" name="republish_rgb" type="republish" pkg="image_transport" args="$(arg rgb_image_transport) in:=$(arg rgb_topic) raw out:=$(arg rgb_topic_relay)" /> <node if="$(arg compressed)" name="republish_depth" type="republish" pkg="image_transport" args="$(arg depth_image_transport) in:=$(arg depth_topic) raw out:=$(arg depth_topic_relay)" /> <node if="$(arg visual_odometry)" pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="$(arg output)" args="$(arg odom_args)" launch-prefix="$(arg launch_prefix)"> <remap from="rgb/image" to="$(arg rgb_topic_relay)"/> <remap from="depth/image" to="$(arg depth_topic_relay)"/> <remap from="rgb/camera_info" to="$(arg camera_info_topic)"/> <remap from="rgbd_image" to="$(arg rgbd_topic)"/> <!-- Changed Parameters for better performance --> <!-- 0=Frame-to-Map (F2M) 1=Frame-to-Frame (F2F) --> <param name="Odom/Strategy" value="1"/> <!-- Correspondences: 0=Features Matching, 1=Optical Flow --> <param name="Vis/CorType" value="0"/> <!-- maximum features map size, default 2000 --> <param name="OdomF2M/MaxSize" type="string" value="1000"/> <!-- maximum features extracted by image, default 1000 --> <param name="Vis/MaxFeatures" type="string" value="500"/> <!-- end of changed Parameters for better performance --> <param name="frame_id" type="string" value="$(arg frame_id)"/> <param name="odom_frame_id" type="string" value="$(arg vo_frame_id)"/> <param name="ground_truth_frame_id" type="string" value="$(arg ground_truth_frame_id)"/> <param name="ground_truth_base_frame_id" type="string" value="$(arg ground_truth_base_frame_id)"/> <param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/> <param name="approx_sync" type="bool" value="$(arg approx_sync)"/> <param name="config_path" type="string" value="$(arg cfg)"/> <param name="queue_size" type="int" value="$(arg queue_size)"/> <param name="subscribe_rgbd" type="bool" value="$(arg subscribe_rgbd)"/> </node> </group> <!-- Stereo Odometry --> <group if="$(arg stereo)"> <node if="$(arg compressed)" name="republish_left" type="republish" pkg="image_transport" args="compressed in:=$(arg left_image_topic) raw out:=$(arg left_image_topic_relay)" /> <node if="$(arg compressed)" name="republish_right" type="republish" pkg="image_transport" args="compressed in:=$(arg right_image_topic) raw out:=$(arg right_image_topic_relay)" /> <node if="$(arg visual_odometry)" pkg="rtabmap_ros" type="stereo_odometry" name="stereo_odometry" output="$(arg output)" args="$(arg odom_args)" launch-prefix="$(arg launch_prefix)"> <remap from="left/image_rect" to="$(arg left_image_topic_relay)"/> <remap from="right/image_rect" to="$(arg right_image_topic_relay)"/> <remap from="left/camera_info" to="$(arg left_camera_info_topic)"/> <remap from="right/camera_info" to="$(arg right_camera_info_topic)"/> <param name="frame_id" type="string" value="$(arg frame_id)"/> <param name="odom_frame_id" type="string" value="$(arg vo_frame_id)"/> <param name="ground_truth_frame_id" type="string" value="$(arg ground_truth_frame_id)"/> <param name="ground_truth_base_frame_id" type="string" value="$(arg ground_truth_base_frame_id)"/> <param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/> <param name="approx_sync" type="bool" value="$(arg approx_sync)"/> <param name="config_path" type="string" value="$(arg cfg)"/> <param name="queue_size" type="int" value="$(arg queue_size)"/> </node> </group> <!-- Visual SLAM (robot side) --> <!-- args: "delete_db_on_start" and "udebug" --> <node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="$(arg output)" args="$(arg rtabmap_args)" launch-prefix="$(arg launch_prefix)"> <param if="$(arg stereo)" name="subscribe_depth" type="bool" value="false"/> <param unless="$(arg stereo)" name="subscribe_depth" type="bool" value="true"/> <param unless="$(arg stereo)" name="subscribe_rgbd" type="bool" value="$(arg subscribe_rgbd)"/> <param name="subscribe_stereo" type="bool" value="$(arg stereo)"/> <param name="subscribe_scan" type="bool" value="$(arg subscribe_scan)"/> <param name="subscribe_scan_cloud" type="bool" value="$(arg subscribe_scan_cloud)"/> <param name="subscribe_user_data" type="bool" value="$(arg subscribe_user_data)"/> <param name="frame_id" type="string" value="$(arg frame_id)"/> <param name="map_frame_id" type="string" value="$(arg map_frame_id)"/> <param name="odom_frame_id" type="string" value="$(arg odom_frame_id)"/> <param name="ground_truth_frame_id" type="string" value="$(arg ground_truth_frame_id)"/> <param name="ground_truth_base_frame_id" type="string" value="$(arg ground_truth_base_frame_id)"/> <param name="odom_tf_angular_variance" type="double" value="$(arg odom_tf_angular_variance)"/> <param name="odom_tf_linear_variance" type="double" value="$(arg odom_tf_linear_variance)"/> <param name="odom_sensor_sync" type="bool" value="$(arg odom_sensor_sync)"/> <param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/> <param name="database_path" type="string" value="$(arg database_path)"/> <param name="approx_sync" type="bool" value="$(arg approx_sync)"/> <param name="config_path" type="string" value="$(arg cfg)"/> <param name="queue_size" type="int" value="$(arg queue_size)"/> <param name="scan_normal_k" type="int" value="$(arg scan_normal_k)"/> <!-- Changed Parameters for better performance --> <param name="Reg/Force3DoF" value="true"/> <param name="Optimizer/Slam2D" value="true"/> <param name="grid_size" type="double" value="30"/> <!-- 30 meters wide --> <param name="proj_max_height" value="2.0"/> <!-- end of changed Parameters for better performance --> <remap from="rgb/image" to="$(arg rgb_topic_relay)"/> <remap from="depth/image" to="$(arg depth_topic_relay)"/> <remap from="rgb/camera_info" to="$(arg camera_info_topic)"/> <remap from="rgbd_image" to="$(arg rgbd_topic)"/> <remap from="left/image_rect" to="$(arg left_image_topic_relay)"/> <remap from="right/image_rect" to="$(arg right_image_topic_relay)"/> <remap from="left/camera_info" to="$(arg left_camera_info_topic)"/> <remap from="right/camera_info" to="$(arg right_camera_info_topic)"/> <remap from="scan" to="$(arg scan_topic)"/> <remap from="scan_cloud" to="$(arg scan_cloud_topic)"/> <remap from="user_data" to="$(arg user_data_topic)"/> <remap from="user_data_async" to="$(arg user_data_async_topic)"/> <remap unless="$(arg visual_odometry)" from="odom" to="$(arg odom_topic)"/> <!-- localization mode --> <param if="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="false"/> <param unless="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="true"/> <param name="Mem/InitWMWithAllNodes" type="string" value="$(arg localization)"/> </node> <!-- Visualisation RTAB-Map --> <node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(arg gui_cfg)" output="$(arg output)" launch-prefix="$(arg launch_prefix)"> <param if="$(arg stereo)" name="subscribe_depth" type="bool" value="false"/> <param unless="$(arg stereo)" name="subscribe_depth" type="bool" value="true"/> <param unless="$(arg stereo)" name="subscribe_rgbd" type="bool" value="$(arg subscribe_rgbd)"/> <param name="subscribe_stereo" type="bool" value="$(arg stereo)"/> <param name="subscribe_scan" type="bool" value="$(arg subscribe_scan)"/> <param name="subscribe_scan_cloud" type="bool" value="$(arg subscribe_scan_cloud)"/> <param name="subscribe_odom_info" type="bool" value="$(arg visual_odometry)"/> <param name="frame_id" type="string" value="$(arg frame_id)"/> <param name="odom_frame_id" type="string" value="$(arg odom_frame_id)"/> <param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/> <param name="queue_size" type="int" value="$(arg queue_size)"/> <param name="approx_sync" type="bool" value="$(arg approx_sync)"/> <remap from="rgb/image" to="$(arg rgb_topic_relay)"/> <remap from="depth/image" to="$(arg depth_topic_relay)"/> <remap from="rgb/camera_info" to="$(arg camera_info_topic)"/> <remap from="rgbd_image" to="$(arg rgbd_topic)"/> <remap from="left/image_rect" to="$(arg left_image_topic_relay)"/> <remap from="right/image_rect" to="$(arg right_image_topic_relay)"/> <remap from="left/camera_info" to="$(arg left_camera_info_topic)"/> <remap from="right/camera_info" to="$(arg right_camera_info_topic)"/> <remap from="scan" to="$(arg scan_topic)"/> <remap from="scan_cloud" to="$(arg scan_cloud_topic)"/> <remap unless="$(arg visual_odometry)" from="odom" to="$(arg odom_topic)"/> </node> </group> <!-- Visualization RVIZ --> <node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(arg rviz_cfg)"/> <node if="$(arg rviz)" pkg="nodelet" type="nodelet" name="points_xyzrgb" args="standalone rtabmap_ros/point_cloud_xyzrgb"> <remap from="left/image" to="$(arg left_image_topic_relay)"/> <remap from="right/image" to="$(arg right_image_topic_relay)"/> <remap from="left/camera_info" to="$(arg left_camera_info_topic)"/> <remap from="right/camera_info" to="$(arg right_camera_info_topic)"/> <remap from="rgb/image" to="$(arg rgb_topic_relay)"/> <remap from="depth/image" to="$(arg depth_topic_relay)"/> <remap from="rgb/camera_info" to="$(arg camera_info_topic)"/> <remap from="cloud" to="voxel_cloud" /> <param name="decimation" type="double" value="2"/> <param name="voxel_size" type="double" value="0.02"/> <param name="approx_sync" type="bool" value="$(arg approx_sync)"/> </node> </launch>
| Free forum by Nabble | Edit this page |