Re: Mapping performance and hallway problems with Kinect 2
Posted by Wezza on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Mapping-performance-and-hallway-problems-with-Kinect-2-tp3956p3971.html
Hello again!
I have used ntp to synchronize the computers, i hope that's okay too.
I set rate=10, the output for
I tried to start only rtabmapviz on the client, but I didn't succeed. As a starting point I used the launchfile from chapter 5.1 of the manual (Remote_Mapping) and modified it.
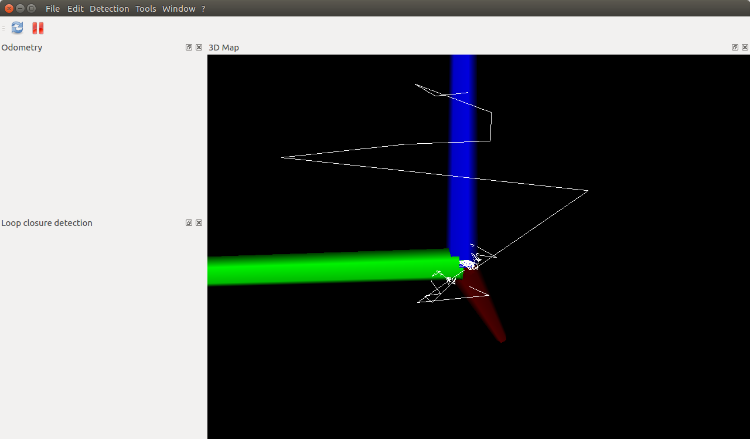
Can you please look at my code and tell me if it's all right? I'd like to see at least one camera image to drive safely. Right now i get no warning or error message and all I see is this:
I get the same result when I copy the rtabmapviz part from the rtabmap.launch file. When i set subscribe_depth=true I get the warning:
ROS Master commands are integrated into the .bashrc. Commands used on robot:
Commands used on client:
Best regards, Wezza
URL: http://official-rtab-map-forum.206.s1.nabble.com/Mapping-performance-and-hallway-problems-with-Kinect-2-tp3956p3971.html
Hello again!
I have used ntp to synchronize the computers, i hope that's okay too.
I set rate=10, the output for
"rostopic hz /kinect2/data_throttled_camera_info" average rate: 8.405
min: 0.060s max: 0.200s std dev: 0.01963s window: 68
"rostopic hz /kinect2/data_throttled_image/compressed" average rate: 8.546
min: 0.085s max: 0.145s std dev: 0.01778s window: 51
"rostopic hz /kinect2/data_throttled_image_depth/compressedDepth" average rate: 0.585
min: 1.327s max: 4.592s std dev: 0.82700s window: 20
no new messages
no new messages
I tried to start only rtabmapviz on the client, but I didn't succeed. As a starting point I used the launchfile from chapter 5.1 of the manual (Remote_Mapping) and modified it.
<launch> <!-- Visualisation (client side) --> <group ns="rtabmap"> <node pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen"> <param name="subscribe_depth" type="bool" value="false"/> <param name="queue_size" type="int" value="10"/> <param name="frame_id" type="string" value="camera_link"/> <remap from="rgb/image" to="/kinect2/data_throttled_image"/> <remap from="depth/image" to="/kinect2/data_throttled_image_depth"/> <remap from="rgb/camera_info" to="/kinect2/data_throttled_camera_info"/> <param name="rgb/image_transport" type="string" value="compressed"/> <param name="depth/image_transport" type="string" value="compressedDepth"/> </node> </group> </launch>
Can you please look at my code and tell me if it's all right? I'd like to see at least one camera image to drive safely. Right now i get no warning or error message and all I see is this:
started roslaunch server http://192.168.1.11:38987/ SUMMARY ======== PARAMETERS * /rosdistro: kinetic * /rosversion: 1.12.7 * /rtabmap/rtabmapviz/depth/image_transport: compressedDepth * /rtabmap/rtabmapviz/frame_id: camera_link * /rtabmap/rtabmapviz/queue_size: 10 * /rtabmap/rtabmapviz/rgb/image_transport: compressed * /rtabmap/rtabmapviz/subscribe_depth: False NODES /rtabmap/ rtabmapviz (rtabmap_ros/rtabmapviz) ROS_MASTER_URI=http://192.168.1.2:11311 core service [/rosout] found process[rtabmap/rtabmapviz-1]: started with pid [23171] [ INFO] [1513099755.881005553]: Starting node... [ INFO] [1513099756.145582915]: rtabmapviz: Using configuration from "/home/bjorn/catkin_ws/src/rtabmap_ros/launch/config/rgbd_gui.ini" [ INFO] [1513099757.458254732]: Reading parameters from the ROS server... [ INFO] [1513099759.154948058]: Parameters read = 254 [ INFO] [1513099760.143094973]: /rtabmap/rtabmapviz: queue_size = 10 [ INFO] [1513099760.143168667]: /rtabmap/rtabmapviz: rgbd_cameras = 1 [ INFO] [1513099760.143215229]: /rtabmap/rtabmapviz: approx_sync = false [ INFO] [1513099760.175320931]: /rtabmap/rtabmapviz subscribed to: /rtabmap/odom [ INFO] [1513099760.175686968]: rtabmapviz started.
I get the same result when I copy the rtabmapviz part from the rtabmap.launch file. When i set subscribe_depth=true I get the warning:
[ WARN] [1513101861.395385368]: /rtabmap/rtabmapviz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). Parameter "approx_sync" is false, which means that input topics should have all the exact timestamp for the callback to be called. /rtabmap/rtabmapviz subscribed to (exact sync): /rtabmap/odom, /kinect2/data_throttled_image/compressed, /kinect2/data_throttled_image_depth/compressedDepth, /kinect2/data_throttled_camera_info, /rtabmap/odom_info
ROS Master commands are integrated into the .bashrc. Commands used on robot:
roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true roslaunch freenect2_throttle.launch rate:=10 rosrun tf static_transform_publisher 0 0 0 -1.57079667948966 0 -1.5707963267948966 camera_link kinect2_link 100 roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rgb_topic:=/kinect2/qhd/image_color_rect depth_registered_topic:=/kinect2/qhd/image_depth_rect camera_info_topic:=/kinect2/qhd/camera_info rtabmapviz:=false
roslaunch rtabmap_ros rtabmapviz_remote.launch
Best regards, Wezza
| Free forum by Nabble | Edit this page |