Re: Read bag file using rtabmap_ros issue
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Read-bag-file-using-rtabmap-ros-issue-tp3995p4003.html
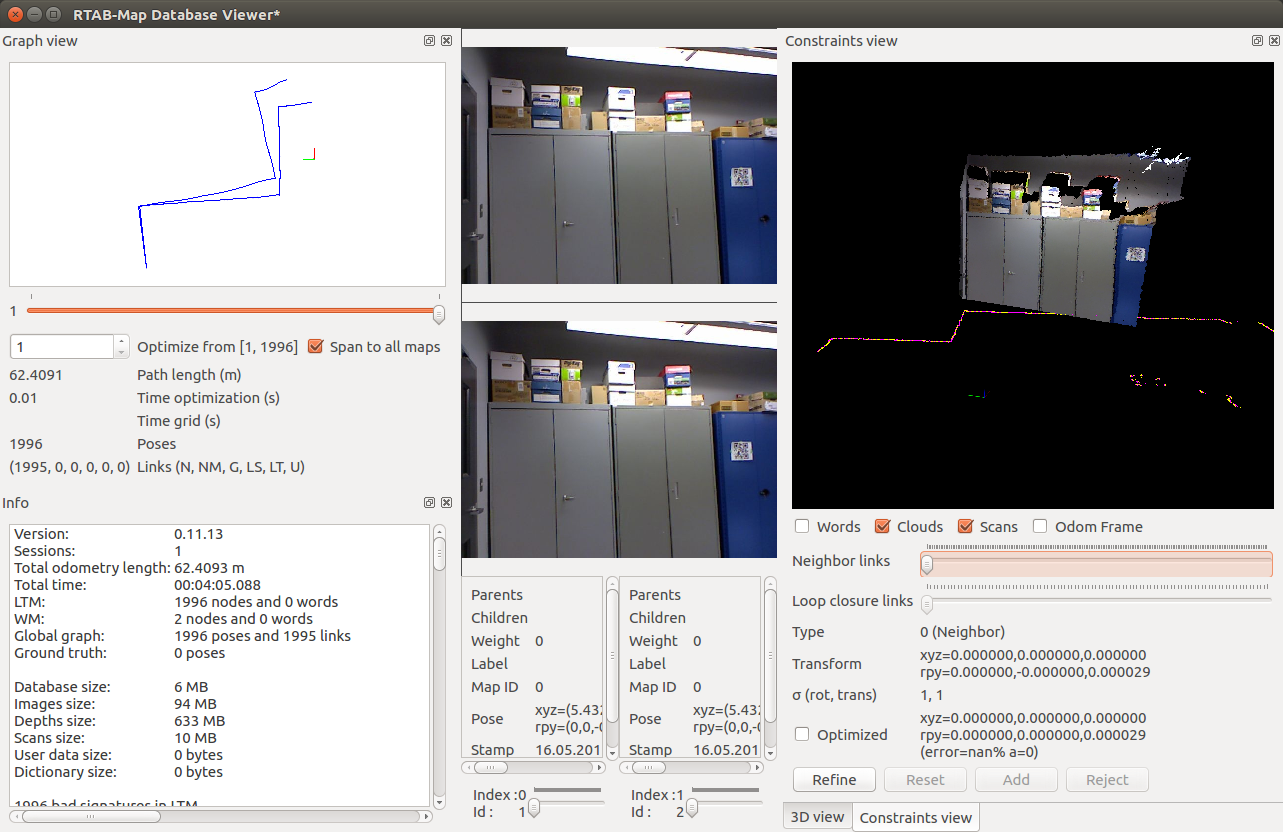
Just tried this with 0.11.13 (binaries on Kinetic) and it works:
URL: http://official-rtab-map-forum.206.s1.nabble.com/Read-bag-file-using-rtabmap-ros-issue-tp3995p4003.html
Just tried this with 0.11.13 (binaries on Kinetic) and it works:
// Start the recorder $ roslaunch rtabmap_ros data_recorder.launch subscribe_depth:=true subscribe_odometry:=true \ subscribe_scan:=true frame_id:=base_link odom_topic:=/az3/base_controller/odom scan_topic:=/jn0/base_scan \ rgb_topic:=data_throttled_image rgb_info_topic:=data_throttled_camera_info \ depth_topic:=data_throttled_image_depth rgb_image_transport:=compressed \ depth_image_transport:=compressedDepth // Play the bag $ rosbag play demo_mapping.bag ... // wait ~246 seconds until it is finished // Do ctrl-c in data_recorder.launch terminal to close the database // Open with database viewer to look at the data recorded $ rtabmap-databaseViewer ~/.ros/output.db
| Free forum by Nabble | Edit this page |