Re: How to use ORB_SLAM2 library in rtabmap?
Posted by Mosquito on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-use-ORB-SLAM2-library-in-rtabmap-tp4230p4237.html
Hi,Mathieu:
After I run :
$./rtabmap-rgbd_dataset --OdomORBSLAM2/VocPath "/home/minipc/ORB_SLAM2-master/Vocabulary/ORBvoc.txt" /home/minipc/ORBSLAM2_Octomap2/dataset/rgbd_dataset_freiburg1_desk
I get "rtabmap.db",then I run :$rtabmap.I load the rtabmap.db in the rtabmap, then i select to export the trajectory.As follows:
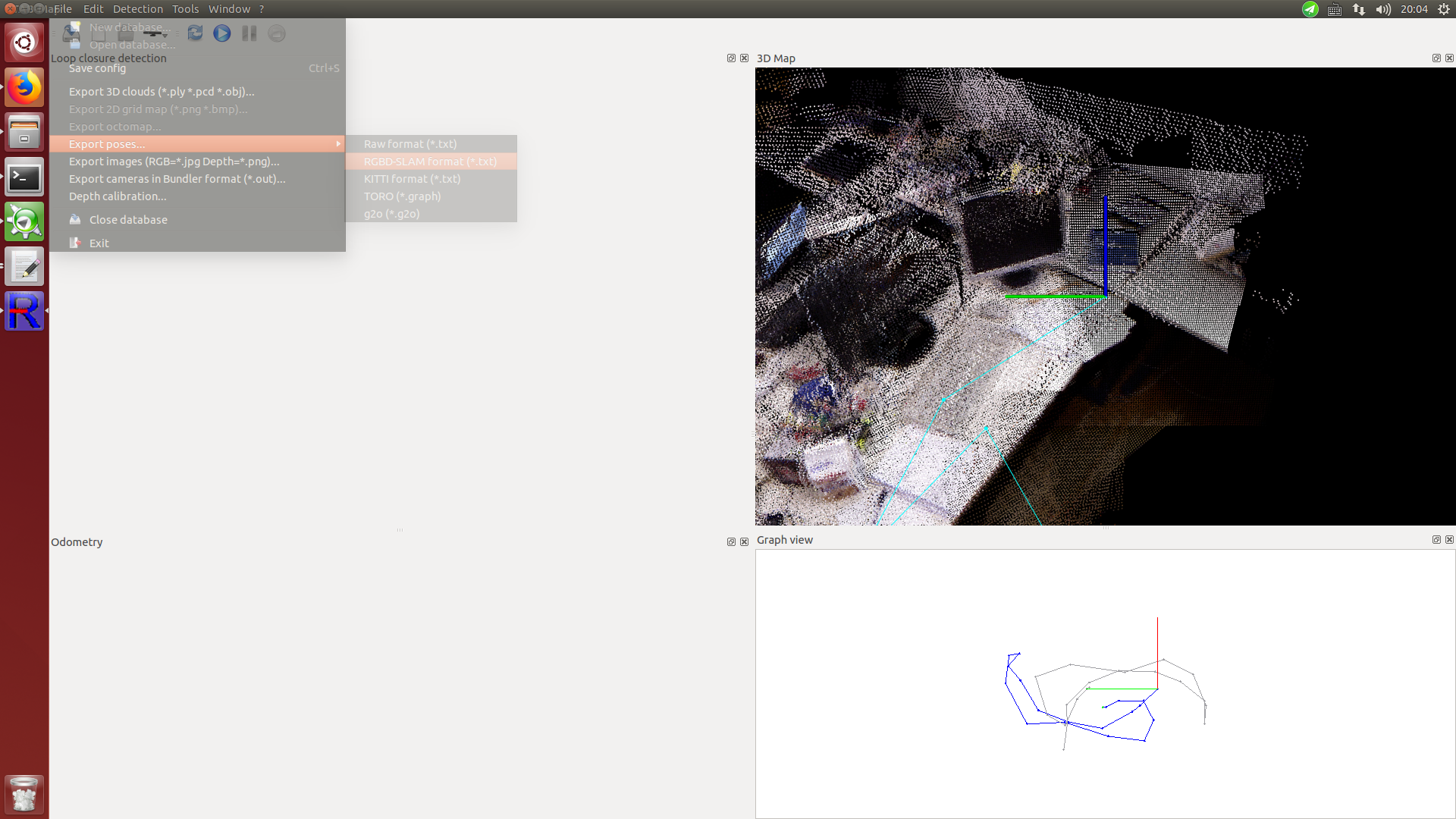
I get pose.txt.Finally, I run :$python evaluate_ate.py groundtruth.txt pose.txt --plot error.png . I get the graph as follows:
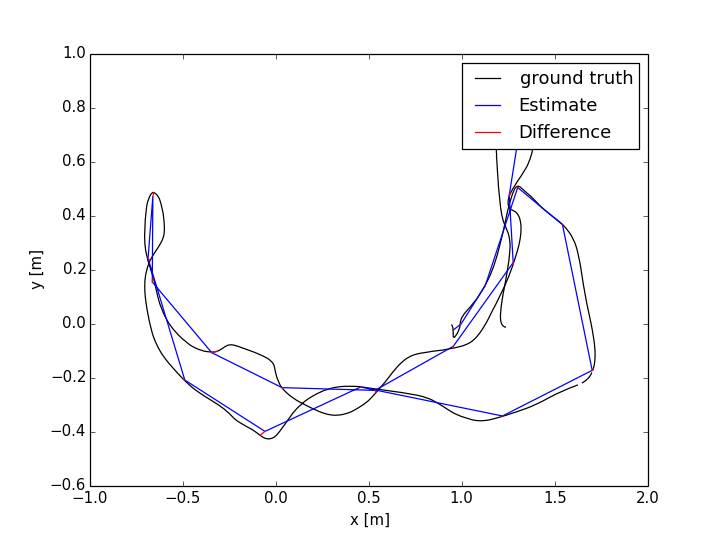
In the graph,the estimate poses is very sparse. In the 'rgbd_dataset_freiburg1_desk' dataset ,It has 573 frames,but the rtabmap finally only get 20 frames' pose.
Can you tell me how to get more frame's pose? Thank you very much!
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-use-ORB-SLAM2-library-in-rtabmap-tp4230p4237.html
Hi,Mathieu:
After I run :
$./rtabmap-rgbd_dataset --OdomORBSLAM2/VocPath "/home/minipc/ORB_SLAM2-master/Vocabulary/ORBvoc.txt" /home/minipc/ORBSLAM2_Octomap2/dataset/rgbd_dataset_freiburg1_desk
I get "rtabmap.db",then I run :$rtabmap.I load the rtabmap.db in the rtabmap, then i select to export the trajectory.As follows:
I get pose.txt.Finally, I run :$python evaluate_ate.py groundtruth.txt pose.txt --plot error.png . I get the graph as follows:
In the graph,the estimate poses is very sparse. In the 'rgbd_dataset_freiburg1_desk' dataset ,It has 573 frames,but the rtabmap finally only get 20 frames' pose.
Can you tell me how to get more frame's pose? Thank you very much!
| Free forum by Nabble | Edit this page |