Re: Help with optimized Tango settings?
Posted by Eric Schleicher on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Help-with-optimized-Tango-settings-tp4244p4245.html
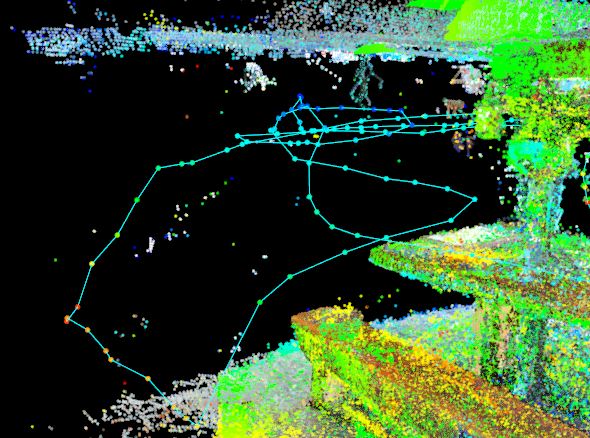
I opened the db in the editor to watched the path...
The resulting odometry is all over the place and not particularly smooth looking. even for handheld

you want a smoother path; more like
My sense is that you're panning (up->down->rotate) motion makes it really hard for VIO to stay accurate (e.g. you're really stressing the inertial integration). If you move in less purely rotational movements and with fewer directional inversions, you may find that not only does the pose drift less, but also that the loop closures tend to be a bit more reliable. in short a bit more flying style, less gimbal
if you move in a more:
1) Fly in
2) Circularly pan with some "conical" tilting and then
3) fly out
4) pick a new path for next Step 1
You have to make sure you don't end up "in" featureless areas which can be a real challenge in tight areas, but If you use this pattern, you can create lots of short loops . the loop closure detection work very well when you reproduce an already observed *trajectory* on a subject with good and unique detail (features).... Not just the same subject in the frame. you want to reproduce the same path to a (fixed) subject to maximize the ability to close loops.
hope that helps.
AR planer is doing a realtime reconstruction from a voxel model, which RTAB is not. each have their strengths. loop closure is RTABS strength, meshing and planar simplification aren't.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Help-with-optimized-Tango-settings-tp4244p4245.html
I opened the db in the editor to watched the path...
The resulting odometry is all over the place and not particularly smooth looking. even for handheld
you want a smoother path; more like
My sense is that you're panning (up->down->rotate) motion makes it really hard for VIO to stay accurate (e.g. you're really stressing the inertial integration). If you move in less purely rotational movements and with fewer directional inversions, you may find that not only does the pose drift less, but also that the loop closures tend to be a bit more reliable. in short a bit more flying style, less gimbal
if you move in a more:
1) Fly in
2) Circularly pan with some "conical" tilting and then
3) fly out
4) pick a new path for next Step 1
You have to make sure you don't end up "in" featureless areas which can be a real challenge in tight areas, but If you use this pattern, you can create lots of short loops . the loop closure detection work very well when you reproduce an already observed *trajectory* on a subject with good and unique detail (features).... Not just the same subject in the frame. you want to reproduce the same path to a (fixed) subject to maximize the ability to close loops.
hope that helps.
AR planer is doing a realtime reconstruction from a voxel model, which RTAB is not. each have their strengths. loop closure is RTABS strength, meshing and planar simplification aren't.
| Free forum by Nabble | Edit this page |