Re: Losing odometry when doing fixed point scanning
Posted by scanboy on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Losing-odometry-when-doing-fixed-point-scanning-tp4336p4341.html
1) I have tried SIFT in OpenCV matching the overlaps with features and tried SIFT in RTABMap. I understand the invariant using my own odometry but one reason why
I might want to use features is that I want to scan in an industrial environment where it is
not possible for human or robot to scan freely so I was hoping that I could use this type of rig
to capture overlapping point clouds/meshes. I.e. that RTABMap would align the point clouds. Maybe this is not even possible directly in RTABMap?
2) You are correct about RGB center vs Camera center, my poses are center of the camera which of course is wrong
So I will have to offset them, what are the units of x,y? (and z even though it is not important here), it doesn't seem to be mm or any other metric unit.
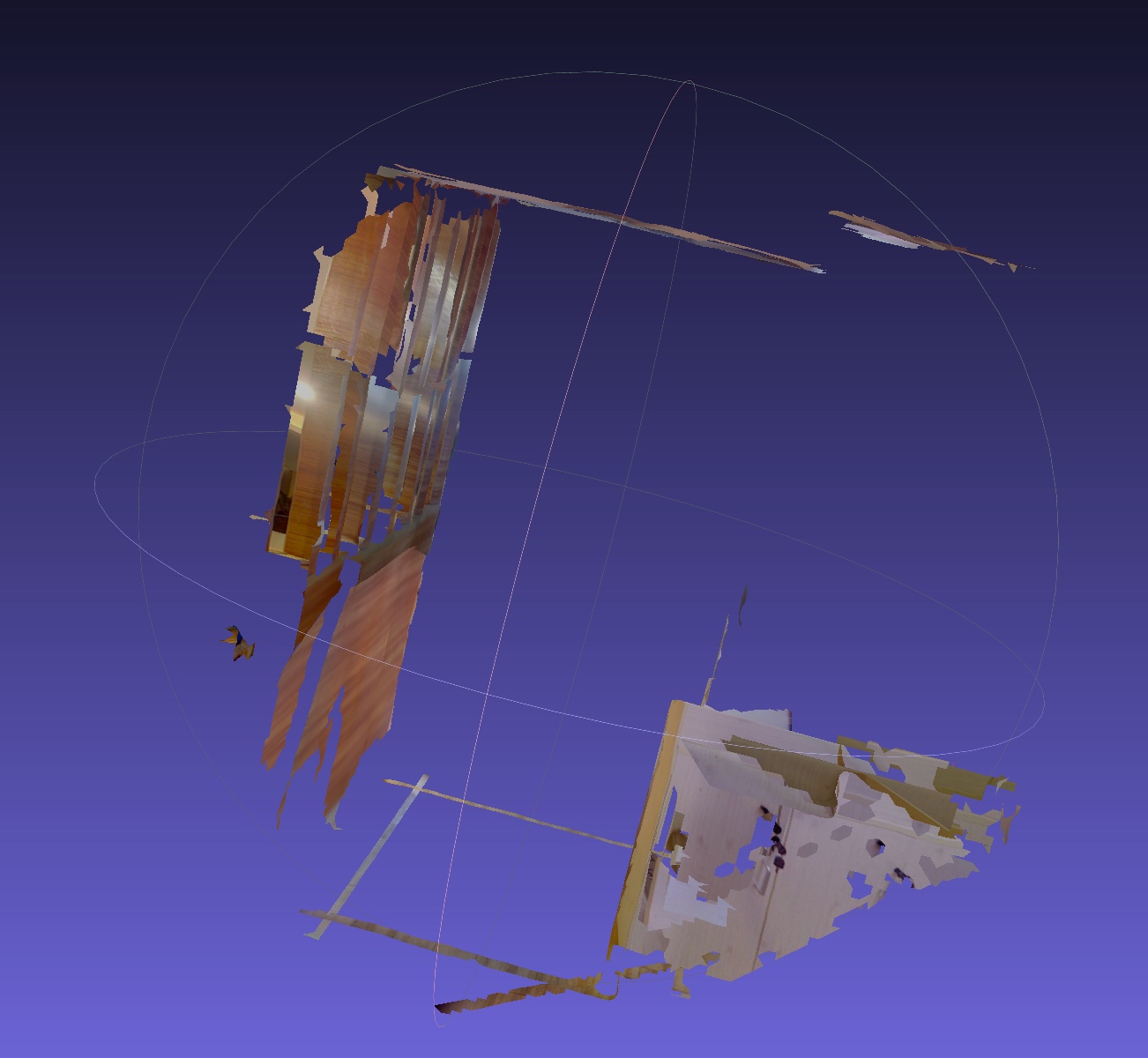
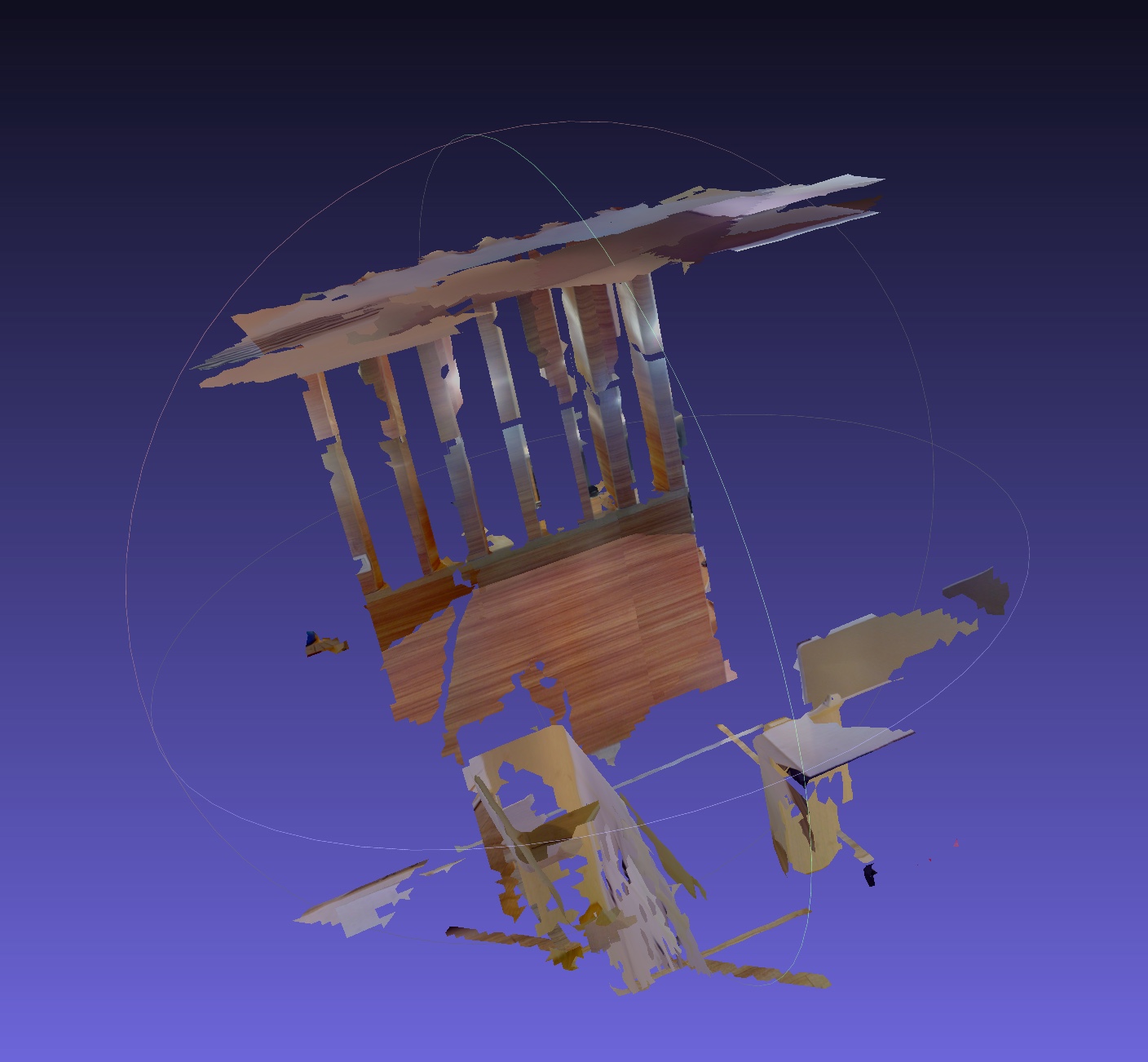
Feel that this can have something to do with the splits in even surfaces as can be seen here and also the floor is just thick lines around the center (this is dense-possion.obj, the ply has a bit more floor but the same split in surface) and I also get quite a bit of swiss cheese holes, less here than in other shots.
Used MeshLab for the screenshots.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Losing-odometry-when-doing-fixed-point-scanning-tp4336p4341.html
1) I have tried SIFT in OpenCV matching the overlaps with features and tried SIFT in RTABMap. I understand the invariant using my own odometry but one reason why
I might want to use features is that I want to scan in an industrial environment where it is
not possible for human or robot to scan freely so I was hoping that I could use this type of rig
to capture overlapping point clouds/meshes. I.e. that RTABMap would align the point clouds. Maybe this is not even possible directly in RTABMap?
2) You are correct about RGB center vs Camera center, my poses are center of the camera which of course is wrong
So I will have to offset them, what are the units of x,y? (and z even though it is not important here), it doesn't seem to be mm or any other metric unit.
Feel that this can have something to do with the splits in even surfaces as can be seen here and also the floor is just thick lines around the center (this is dense-possion.obj, the ply has a bit more floor but the same split in surface) and I also get quite a bit of swiss cheese holes, less here than in other shots.
Used MeshLab for the screenshots.
| Free forum by Nabble | Edit this page |