Re: Losing odometry when doing fixed point scanning
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Losing-odometry-when-doing-fixed-point-scanning-tp4336p4519.html
Hi,
I think you are close to have something working. I think the low number of inliers is mainly because of the not enough accurate local transforms. I am not sure how the pattern on the floor should look like, but it seems awkward from the single assembled scan:
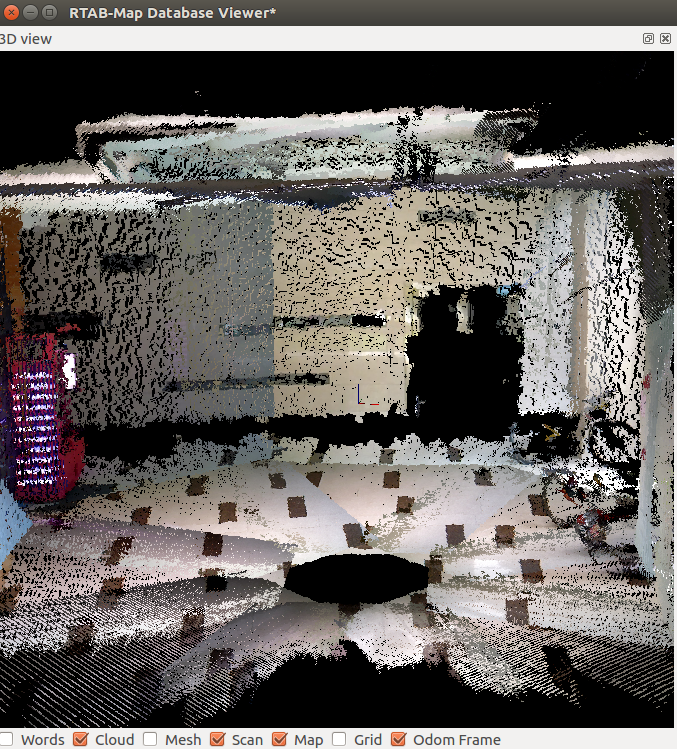
The rectangles are not all perfectly aligned, this will make extracting visual features with a lot more error, then difficult to match if the geometry (distance between same visual features) between scans changes.
The code I tried:
It fails to find enough inliers. If I increase "Vis/InlierDistance", it will accept some transforms but they are very wrong. Having better aligned scans will help to have more inliers with low "Vis/InlierDistance", thus having good motion estimation.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Losing-odometry-when-doing-fixed-point-scanning-tp4336p4519.html
Hi,
I think you are close to have something working. I think the low number of inliers is mainly because of the not enough accurate local transforms. I am not sure how the pattern on the floor should look like, but it seems awkward from the single assembled scan:
The rectangles are not all perfectly aligned, this will make extracting visual features with a lot more error, then difficult to match if the geometry (distance between same visual features) between scans changes.
The code I tried:
ParametersMap detectParams;
detectParams.insert(ParametersPair(Parameters::kVisFeatureType(), "0")); // SURF feature for example
detectParams.insert(ParametersPair(Parameters::kVisMaxFeatures(), "24000"));
detectParams.insert(ParametersPair(Parameters::kVisEstimationType(), "0")); // should be 0 for multi cameras
detectParams.insert(ParametersPair(Parameters::kVisInlierDistance(), "0.1"));
detectParams.insert(ParametersPair(Parameters::kKpDetectorStrategy(), "0")); // use same features for loop closure detection than for motion estimation (SURF here)
detectParams.insert(ParametersPair(Parameters::kSURFHessianThreshold(), "100"));
detectParams.insert(ParametersPair(Parameters::kRtabmapLoopThr(), "0"));
detectParams.insert(ParametersPair(Parameters::kRGBDOptimizeMaxError(), "0"));
DBReader reader("/home/mathieu/Downloads/multicamera2_0.1_4.db");
reader.init();
Rtabmap rtabmap;
rtabmap.init(detectParams, "test.db");
SensorData data = reader.takeImage();
rtabmap.process(data, Transform::getIdentity());
rtabmap.triggerNewMap();
data = reader.takeImage();
rtabmap.process(data, Transform::getIdentity());
rtabmap.close();
It fails to find enough inliers. If I increase "Vis/InlierDistance", it will accept some transforms but they are very wrong. Having better aligned scans will help to have more inliers with low "Vis/InlierDistance", thus having good motion estimation.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |