Re: RTAB Error
Posted by tonike24 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Error-tp4596p4640.html
Hi Mathieu,
Finally I can use RTAB without problems with my compressed topics, also my robot can localize itself. Everything is fine unless I want to navigate. So... I show you my problem:
This is my Tf_Tree, obviously is wrong:
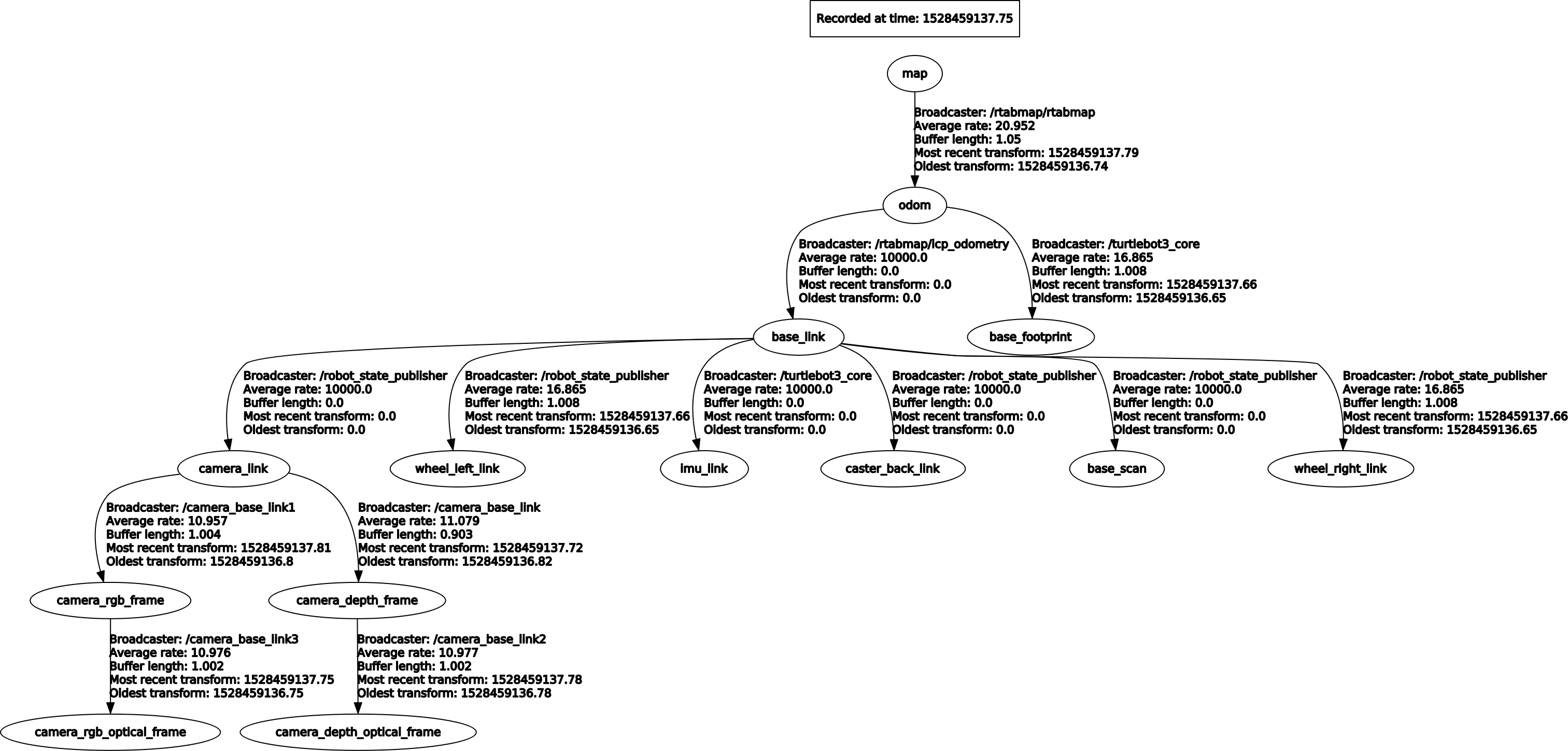
So I decide to change my frame ID in my rtab.launch
<arg name="frame_id" default="<b>base_link"/> I change my base_ink to Base_footprint. When I do this the TF tree is correct, like this:
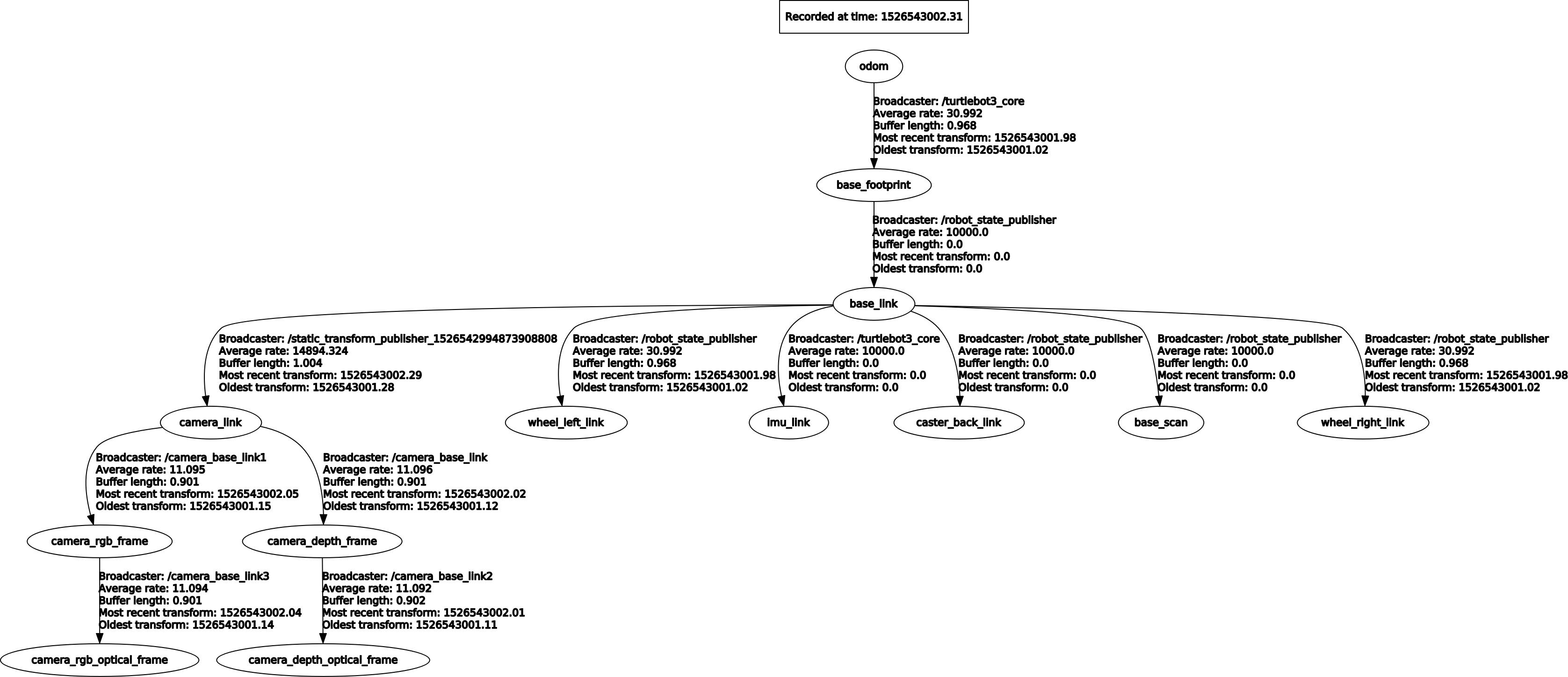
But I have one problem... when my tf tree is correct and I execute my navigation.launch (Because my rtab.launch and navitation.launch are not in the same launch, I will copy my nav.launch later if u can see something wrong)
So I tried to change my robot base frame in costmaps to base_link instead of base_footprint.. Im misunderstanding this, could you explain it to me?.
[ WARN] [1528459815.208587375]: Costmap2DROS transform timeout. Current time: 1528459815.2085, global_pose stamp: 1528459811.5396, tolerance: 0.5000
[ WARN] [1528459815.208638059]: Could not get robot pose, cancelling reconfiguration
This is my nav.launch
<launch>
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="scan_topic" default="/scan"/>
<arg name="map_topic" default="/map"/>
<include file="$(find turtlebot3_navigation)/launch/amcl.launch.xml"/>
<remap from="scan" to="$(arg scan_topic)"/>
<remap from="map" to="$(arg map_topic)"/>
<arg name="cmd_vel_topic" default="/cmd_vel" />
<arg name="odom_topic" default="odom" />
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find rtabmap_ros)/launch/param/costmap_common_params_$(arg model).yaml" command="load" ns="global_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/param/costmap_common_params_$(arg model).yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find rtabmap_ros)/launch/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find rtabmap_ros)/launch/param/move_base_params.yaml" command="load" />
<rosparam file="$(find rtabmap_ros)/launch/param/dwa_local_planner_params.yaml" command="load" />
<remap from="cmd_vel" to="$(arg cmd_vel_topic)"/>
<remap from="odom" to="$(arg odom_topic)"/>
</node>
</launch>
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Error-tp4596p4640.html
Hi Mathieu,
Finally I can use RTAB without problems with my compressed topics, also my robot can localize itself. Everything is fine unless I want to navigate. So... I show you my problem:
This is my Tf_Tree, obviously is wrong:
So I decide to change my frame ID in my rtab.launch
<arg name="frame_id" default="<b>base_link"/> I change my base_ink to Base_footprint. When I do this the TF tree is correct, like this:
But I have one problem... when my tf tree is correct and I execute my navigation.launch (Because my rtab.launch and navitation.launch are not in the same launch, I will copy my nav.launch later if u can see something wrong)
So I tried to change my robot base frame in costmaps to base_link instead of base_footprint.. Im misunderstanding this, could you explain it to me?.
[ WARN] [1528459815.208587375]: Costmap2DROS transform timeout. Current time: 1528459815.2085, global_pose stamp: 1528459811.5396, tolerance: 0.5000
[ WARN] [1528459815.208638059]: Could not get robot pose, cancelling reconfiguration
This is my nav.launch
<launch>
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="scan_topic" default="/scan"/>
<arg name="map_topic" default="/map"/>
<include file="$(find turtlebot3_navigation)/launch/amcl.launch.xml"/>
<remap from="scan" to="$(arg scan_topic)"/>
<remap from="map" to="$(arg map_topic)"/>
<arg name="cmd_vel_topic" default="/cmd_vel" />
<arg name="odom_topic" default="odom" />
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find rtabmap_ros)/launch/param/costmap_common_params_$(arg model).yaml" command="load" ns="global_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/param/costmap_common_params_$(arg model).yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rtabmap_ros)/launch/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find rtabmap_ros)/launch/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find rtabmap_ros)/launch/param/move_base_params.yaml" command="load" />
<rosparam file="$(find rtabmap_ros)/launch/param/dwa_local_planner_params.yaml" command="load" />
<remap from="cmd_vel" to="$(arg cmd_vel_topic)"/>
<remap from="odom" to="$(arg odom_topic)"/>
</node>
</launch>
| Free forum by Nabble | Edit this page |