2D occupancy grid map does not show when using existing map to navigate
Posted by Trung Nguyen on
URL: http://official-rtab-map-forum.206.s1.nabble.com/2D-occupancy-grid-map-does-not-show-when-using-existing-map-to-navigate-tp4719.html
Hi Mathieu,
I am doing a project, in which the robot will use existing 2D and 3D map to autonomously navigate through the environment. I have successfully be able to create 3D and 2D map using rtabmap. When I drive robot around for making maps, I saw 2D and 3D maps appear on RVIZ. I also check again by using rtabmap-databaseViewer. Everything is ok. However, when I use localization mode of rtabmap, that is, I use existing maps for navigation, the 2D map does not appear on RVIZ. 3D map appears when I click Download map from MapCloud. I have read tutorials and many of your comments, saying that 2D map will automatically appear on RVIZ as soon as robot is able to find relocalize itself. And I am pretty sure that the robot is already able to localize itself when I turn program up, because location of robot in 3D map is correct. I would really appreciate if you know what happens. Here is my RVIZ when I run program
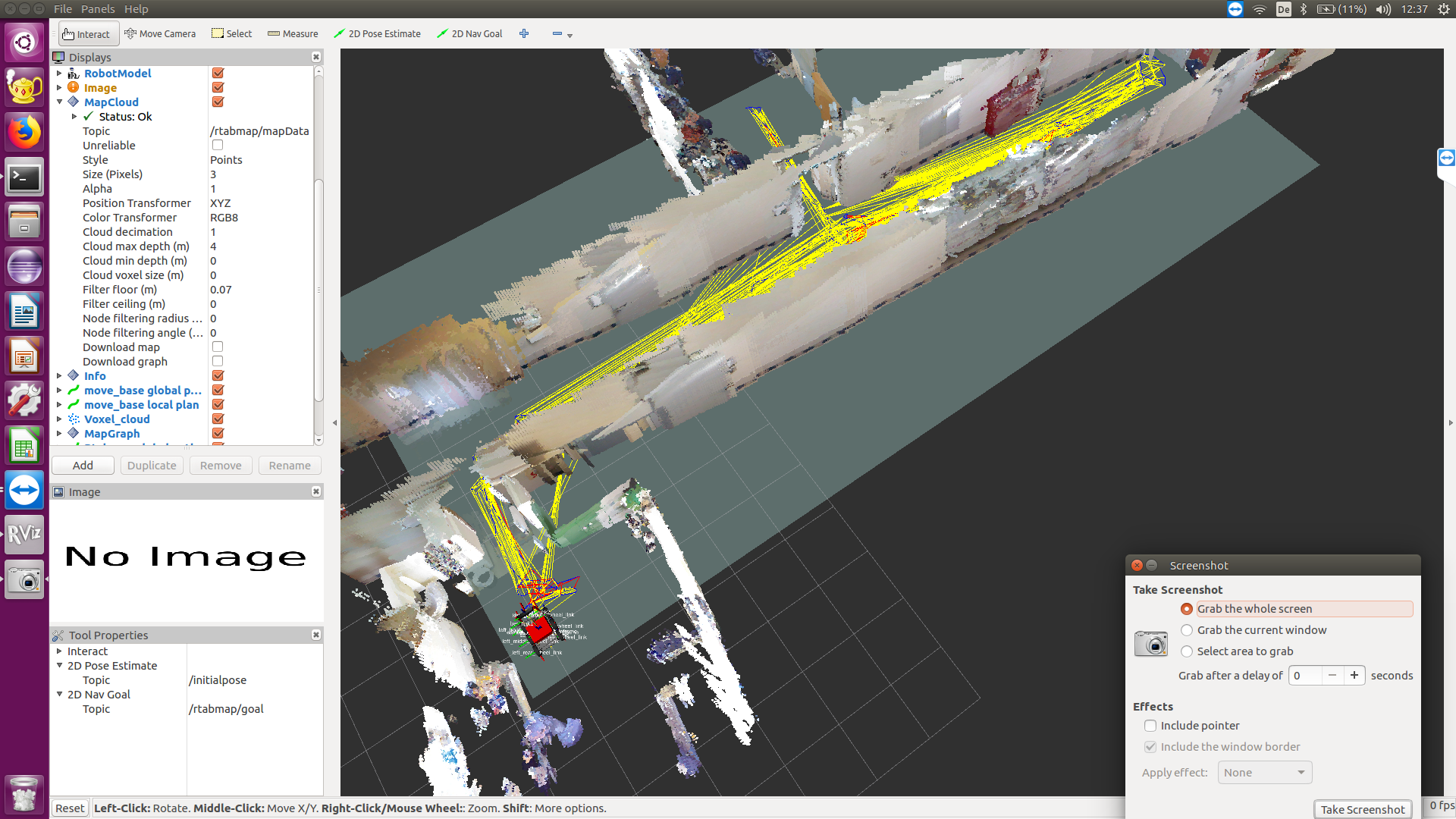
I am able to navigate through the map just by clicking 2D Nav goal and click point on the large blue rectangle beneath the 3D map. But when I click somewhere that is not in the blue rectangle, but still in 3D maps, the plan will fail, output the message:
The goal sent to the navfn planner is off the global costmap. Planning will always fail to this goal.
I want to ask if 2D occupancy grid map is used for navigation ?????? I guess that it is used because as far as I know, navigation stack only use 2D map , not 3D. But if it is used, why does it not appear on RVIZ ?????
Here is my code
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%"><launch>
<!-- Localization-only mode -->
<arg name="localization" default="false"/>
<arg if="$(arg localization)" name="rtabmap_args" default=""/>
<arg unless="$(arg localization)" name="rtabmap_args" default="--delete_db_on_start"/>
<arg if="$(arg localization)" name="increment_memory" default="false"/>
<arg unless="$(arg localization)" name="increment_memory" default="true"/>
<arg name="database_path" default="~/.ros/rtabmap.db"/>
<!-- Volksbot 3 bringup: launch motors/odometry -->
<include file="$(find freenect_launch)/launch/freenect.launch">
<arg name="depth_registration" value="True" />
</include>
<include file="$(find lms1xx)launch/LMS1xx.launch"/>
<include file="$(find volksbot_driver)launch/volksbot.launch"/>
<node pkg="tf" type="static_transform_publisher" name="camera"
args="0 0 0 0 0 0 base_link camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="laser"
args="0 0 0 0 0 0 base_link laser 100" />
<!-- teleop -->
<include file="$(find turtlebot_teleop)/launch/includes/velocity_smoother.launch.xml"/>
<node pkg="turtlebot_teleop" type="turtlebot_teleop_joy" name="turtlebot_teleop_joystick">
<param name="scale_angular" value="0.2"/>
<param name="scale_linear" value="0.1"/>
<param name="axis_deadman" value="0"/>
<param name="axis_linear" value="1"/>
<param name="axis_angular" value="0"/>
<remap from="turtlebot_teleop_joystick/cmd_vel" to="cmd_vel"/>
</node>
<node pkg="joy" type="joy_node" name="joystick"/>
<!-- HECTOR MAPPING VERSION: use this with ROS bag demo_mapping_no_odom.bag generated -->
<!-- Choose visualization -->
<arg name="rviz" default="true" />
<arg name="rtabmapviz" default="false" />
<param name="use_sim_time" type="bool" value="false"/>
<node pkg="tf" type="static_transform_publisher" name="scanmatcher_to_base_footprint"
args="0.0 0.0 0.0 0.0 0.0 0.0 /scanmatcher_frame /base_footprint 100" />
<!-- Odometry from laser scans -->
<!-- We use Hector mapping to generate odometry for us -->
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="map_frame" value="hector_map" />
<param name="base_frame" value="base_footprint" />
<param name="odom_frame" value="odom" />
<!-- Tf use -->
<param name="pub_map_odom_transform" value="false"/>
<param name="pub_map_scanmatch_transform" value="true"/>
<param name="pub_odometry" value="true"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.050"/>
<param name="map_size" value="2048"/>
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="scan_topic" value="/scan"/>
</node>
<group ns="rtabmap">
<!-- SLAM (robot side) -->
<!-- args: "delete_db_on_start" and "udebug" -->
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="$(arg rtabmap_args)">
<param name="frame_id" type="string" value="base_footprint"/>
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_scan" type="bool" value="true"/>
<remap from="odom" to="/scanmatch_odom"/>
<remap from="scan" to="/scan"/>
<remap from="mapData" to="mapData"/>
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="goal_out" to="/move_base_simple/goal"/>
<remap from="move_base" to="/planner/move_base"/>
<remap from="grid_map" to="/rtabmap/grid_map"/>
<param name="database_path" type="string" value="$(arg database_path)"/>
<!-- RTAB-Map's parameters -->
<param name="Reg/Strategy" type="string" value="1"/> <!-- 0=Visual, 1=ICP, 2=Visual+ICP -->
<param name="Vis/MaxDepth" type="string" value="10.0"/> <!-- 3D visual words maximum depth 0=infinity -->
<param name="Vis/InlierDistance" type="string" value="0.1"/> <!-- 3D visual words correspondence distance -->
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="Grid/FromDepth" type="string" value="false"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="true"/>
<param name="Optimizer/Strategy" type="string" value="0"/>
<param name="Kp/DetectorStrategy" type="string" value="0"/>
<param name="Kp/MaxFeatures" type="string" value="200"/>
<param name="SURF/HessianThreshold" type="string" value="500"/>
<param name="Icp/CorrespondenceRatio" type="string" value="0.2"/>
<param name="RGBD/ProximityPathMaxNeighbors" type="string" value="10"/>
<param name="Mem/IncrementalMemory" type="string" value="$(arg increment_memory)"/>
</node>
<!-- Visualisation RTAB-Map -->
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_laserScan" type="bool" value="true"/>
<param name="frame_id" type="string" value="base_footprint"/>
<remap from="rgb/image" to="/camera/rgb/image_raw"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="scan" to="/scan"/>
<remap from="odom" to="/scanmatch_odom"/>
<param name="rgb/image_transport" type="string" value="compressed"/>
<param name="depth/image_transport" type="string" value="compressedDepth"/>
</node>
</group>
<!-- ROS navigation stack move_base -->
<remap from="odom" to="/scanmatch_odom"/>
<remap from="scan" to="/scan"/>
<remap from="obstacles_cloud" to="/obstacles_cloud"/>
<remap from="ground_cloud" to="/ground_cloud"/>
<remap from="map" to="/rtabmap/grid_map"/>
<node pkg="move_base" type="move_base" respawn="true" name="move_base" output="screen">
<param name="base_global_planner" value="navfn/NavfnROS"/>
<rosparam file="$(find volksbot_navstack)/costmap_usethis/costmap_common_params_2d.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find volksbot_navstack)/costmap_usethis/costmap_common_params_2d.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find volksbot_navstack)/costmap_usethis/local_costmap_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find volksbot_navstack)/costmap_usethis/global_costmap_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find volksbot_navstack)/costmap_usethis/base_local_planner_params.yaml" command="load" />
<rosparam file="$(find volksbot_navstack)/costmap_usethis/move_base_params.yaml" command="load" />
</node>
<!-- Visualisation RVIZ -->
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/azimut3/config/azimut3_nav.rviz" output="screen"/>
<node pkg="nodelet" type="nodelet" name="points_xyzrgb" args="standalone rtabmap_ros/point_cloud_xyzrgb">
<remap from="rgb/image" to="/camera/rgb/image_raw"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="cloud" to="voxel_cloud" />
<param name="rgb/image_transport" type="string" value="compressed"/>
<param name="depth/image_transport" type="string" value="compressedDepth"/>
<param name="voxel_size" type="double" value="0.01"/>
</node>
<!-- Throttling messages -->
<group ns="camera">
<node pkg="nodelet" type="nodelet" name="data_throttle" args="load rtabmap_ros/data_throttle camera_nodelet_manager">
<param name="rate" type="double" value="5"/>
<param name="decimation" type="int" value="2"/>
<remap from="rgb/image_in" to="rgb/image_rect_color"/>
<remap from="depth/image_in" to="depth_registered/image_raw"/>
<remap from="rgb/camera_info_in" to="depth_registered/camera_info"/>
<remap from="rgb/image_out" to="data_resized_image"/>
<remap from="depth/image_out" to="data_resized_image_depth"/>
<remap from="rgb/camera_info_out" to="data_resized_camera_info"/>
</node>
<!-- for the planner -->
<node pkg="nodelet" type="nodelet" name="points_xyz_planner" args="load rtabmap_ros/point_cloud_xyz camera_nodelet_manager">
<remap from="depth/image" to="data_resized_image_depth"/>
<remap from="depth/camera_info" to="data_resized_camera_info"/>
<remap from="cloud" to="cloudXYZ" />
<param name="decimation" type="int" value="1"/> <!-- already decimated above -->
<param name="max_depth" type="double" value="3.0"/>
<param name="voxel_size" type="double" value="0.02"/>
</node>
<node pkg="nodelet" type="nodelet" name="obstacles_detection" args="load rtabmap_ros/obstacles_detection camera_nodelet_manager">
<remap from="cloud" to="cloudXYZ"/>
<remap from="obstacles" to="/obstacles_cloud"/>
<remap from="ground" to="/ground_cloud"/>
<param name="frame_id" type="string" value="base_footprint"/>
<param name="map_frame_id" type="string" value="map"/>
<param name="wait_for_transform" type="bool" value="true"/>
<param name="Grid/MinClusterSize" type="int" value="20"/>
<param name="Grid/MaxObstacleHeight" type="double" value="0.4"/>
</node>
</group>
</launch>
</pre></div>
I also would like to provide yaml file for move_base, just in case you need some review:
global_costmap_params.yaml:
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%">#global_costmap
global_frame: map
robot_base_frame: base_footprint
update_frequency: 1
publish_frequency: 1
always_send_full_costmap: false
plugins:
- {name: static_layer, type: "rtabmap_ros::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
</pre></div>
local_costmap_params.yaml:
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%">global_frame: hector_map
robot_base_frame: base_footprint
update_frequency: 2
publish_frequency: 2
rolling_window: true
width: 3.0
height: 3.0
resolution: 0.025
origin_x: 0
origin_y: 0
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
</pre></div>
costmap_commons_params_2d.yaml:
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%">footprint: [[ 0.31, 0.25], [-0.31, 0.25], [-0.31, -0.25], [ 0.31, -0.25], [0.31, -0.07], [0.46, -0.07], [0.46, 0.07], [0.31, 0.07]]
footprint_padding: 0.03
inflation_layer:
inflation_radius: 1.1 # 2xfootprint, it helps to keep the global planned path farther from obstacles
transform_tolerance: 0.5
cost_scaling_factor: 5.0
obstacle_layer:
obstacle_range: 2
raytrace_range: 3
max_obstacle_height: 0.4
track_unknown_space: true
observation_sources: laser_scan_sensor point_cloud_sensorA point_cloud_sensorB
laser_scan_sensor: {
data_type: LaserScan,
topic: scan,
expected_update_rate: 0.1,
marking: true,
clearing: true
}
point_cloud_sensorA: {
sensor_frame: base_footprint,
data_type: PointCloud2,
topic: obstacles_cloud,
expected_update_rate: 1.0,
marking: true,
clearing: true,
min_obstacle_height: 0.04
}
point_cloud_sensorB: {
sensor_frame: base_footprint,
data_type: PointCloud2,
topic: ground_cloud,
expected_update_rate: 1.0,
marking: false,
clearing: true,
min_obstacle_height: -1.0 # make sure the ground is not filtered
}
</pre></div>
base_local_planner_params.yaml:
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%">TrajectoryPlannerROS:
# Current limits based on AZ3 standalone configuration.
acc_lim_x: 0.65
acc_lim_y: 0.65
acc_lim_theta: 1.0
# min_vel_x and max_rotational_vel were set to keep the ICR at
# minimal distance of 0.48 m.
# Basically, max_rotational_vel * rho_min <= min_vel_x
max_vel_x: 0.3
min_vel_x: 0.06
max_vel_theta: 0.1
min_vel_theta: -0.1
min_in_place_vel_theta: 0.2
holonomic_robot: false
xy_goal_tolerance: 0.2
yaw_goal_tolerance: 0.2
latch_xy_goal_tolerance: true
# make sure that the minimum velocity multiplied by the sim_period is less than twice the tolerance on a goal. Otherwise, the robot will prefer to rotate in place just outside of range of its target position rather than moving towards the goal.
sim_time: 1.5 # set between 1 and 2. The higher he value, the smoother the path (though more samples would be required).
sim_granularity: 0.025
angular_sim_granularity: 0.05
vx_samples: 12
vtheta_samples: 20
meter_scoring: true
pdist_scale: 0.6 # The higher will follow more the global path.
gdist_scale: 0.8
occdist_scale: 0.01
publish_cost_grid_pc: false
#move_base
controller_frequency: 12.0 #The robot can move faster when higher.
#global planner
NavfnROS:
allow_unknown: true
visualize_potential: false
</pre></div>
move_base_params.yaml:
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%">controller_frequency: 10.0
controller_patience: 5.0
planner_frequency: 0.0
planner_patience: 5.0
#oscillation_timeout: 10.0
recovery_behavior_enabled: true
clearing_rotation_allowed: true
recovery_behaviors:
- {name: conservative_reset, type: clear_costmap_recovery/ClearCostmapRecovery}
# - {name: rotate_recovery, type: rotate_recovery/RotateRecovery}
# - {name: straf_recovery, type: straf_recovery/StrafRecovery}
# - {name: stepback_and_steerturn_recovery, type: stepback_and_steerturn_recovery/StepBackAndSteerTurnRecovery}
- {name: aggressive_reset, type: clear_costmap_recovery/ClearCostmapRecovery}
straf_recovery:
timeout: 2
minimum_translate_distance: 0.05
maximum_translate_distance: 0.10
straf_vel: 0.05
stepback_and_steerturn_recovery:
only_single_steering: true
trial_times: 3
obstacle_patience: 0.3
obstacle_check_frequency: 5.0
sim_angle_resolution: 0.1
simulation_frequency: 5
linear_vel_back : -0.1
step_back_length : 0.3
step_back_timeout : 8.0
linear_vel_steer : 0.3
angular_speed_steer : 0.5
turn_angle : 1.5
steering_timeout : 8.0
linear_vel_forward : 0.1
step_forward_length : 1.0
step_forward_timeout: 8.0
</pre></div>
roswitha@roswitha:~$ roslaunch volksbot_navstack rtab_hector_nav.launch database_path:="~/catkin_ws/src/volksbot_navstack/rtabmap.db" localization:=true
... logging to /home/roswitha/.ros/log/bd63db2e-7c50-11e8-a65f-3c970eb9cf5e/roslaunch-roswitha-7281.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order
xacro.py is deprecated; please use xacro instead
started roslaunch server http://10.12.13.220:45855/
SUMMARY
========
PARAMETERS
* /camera/camera_nodelet_manager/num_worker_threads: 4
* /camera/data_throttle/decimation: 2
* /camera/data_throttle/rate: 5.0
* /camera/depth_rectify_depth/interpolation: 0
* /camera/depth_registered_rectify_depth/interpolation: 0
* /camera/disparity_depth/max_range: 4.0
* /camera/disparity_depth/min_range: 0.5
* /camera/disparity_registered_hw/max_range: 4.0
* /camera/disparity_registered_hw/min_range: 0.5
* /camera/disparity_registered_sw/max_range: 4.0
* /camera/disparity_registered_sw/min_range: 0.5
* /camera/driver/data_skip: 0
* /camera/driver/debug: False
* /camera/driver/depth_camera_info_url:
* /camera/driver/depth_frame_id: camera_depth_opti...
* /camera/driver/depth_registration: True
* /camera/driver/device_id: #1
* /camera/driver/diagnostics_max_frequency: 30.0
* /camera/driver/diagnostics_min_frequency: 30.0
* /camera/driver/diagnostics_tolerance: 0.05
* /camera/driver/diagnostics_window_time: 5.0
* /camera/driver/enable_depth_diagnostics: False
* /camera/driver/enable_ir_diagnostics: False
* /camera/driver/enable_rgb_diagnostics: False
* /camera/driver/rgb_camera_info_url:
* /camera/driver/rgb_frame_id: camera_rgb_optica...
* /camera/obstacles_detection/Grid/MaxObstacleHeight: 0.4
* /camera/obstacles_detection/Grid/MinClusterSize: 20
* /camera/obstacles_detection/frame_id: base_footprint
* /camera/obstacles_detection/map_frame_id: map
* /camera/obstacles_detection/wait_for_transform: True
* /camera/points_xyz_planner/decimation: 1
* /camera/points_xyz_planner/max_depth: 3.0
* /camera/points_xyz_planner/voxel_size: 0.02
* /hector_mapping/base_frame: base_footprint
* /hector_mapping/map_frame: hector_map
* /hector_mapping/map_multi_res_levels: 2
* /hector_mapping/map_resolution: 0.05
* /hector_mapping/map_size: 2048
* /hector_mapping/map_update_angle_thresh: 0.06
* /hector_mapping/odom_frame: odom
* /hector_mapping/pub_map_odom_transform: False
* /hector_mapping/pub_map_scanmatch_transform: True
* /hector_mapping/pub_odometry: True
* /hector_mapping/scan_topic: /scan
* /lms1xx/host: 10.12.184.173
* /move_base/NavfnROS/allow_unknown: True
* /move_base/NavfnROS/visualize_potential: False
* /move_base/TrajectoryPlannerROS/acc_lim_theta: 1.0
* /move_base/TrajectoryPlannerROS/acc_lim_x: 0.65
* /move_base/TrajectoryPlannerROS/acc_lim_y: 0.65
* /move_base/TrajectoryPlannerROS/angular_sim_granularity: 0.05
* /move_base/TrajectoryPlannerROS/gdist_scale: 0.8
* /move_base/TrajectoryPlannerROS/holonomic_robot: False
* /move_base/TrajectoryPlannerROS/latch_xy_goal_tolerance: True
* /move_base/TrajectoryPlannerROS/max_vel_theta: 0.1
* /move_base/TrajectoryPlannerROS/max_vel_x: 0.3
* /move_base/TrajectoryPlannerROS/meter_scoring: True
* /move_base/TrajectoryPlannerROS/min_in_place_vel_theta: 0.2
* /move_base/TrajectoryPlannerROS/min_vel_theta: -0.1
* /move_base/TrajectoryPlannerROS/min_vel_x: 0.06
* /move_base/TrajectoryPlannerROS/occdist_scale: 0.01
* /move_base/TrajectoryPlannerROS/pdist_scale: 0.6
* /move_base/TrajectoryPlannerROS/publish_cost_grid_pc: False
* /move_base/TrajectoryPlannerROS/sim_granularity: 0.025
* /move_base/TrajectoryPlannerROS/sim_time: 1.5
* /move_base/TrajectoryPlannerROS/vtheta_samples: 20
* /move_base/TrajectoryPlannerROS/vx_samples: 12
* /move_base/TrajectoryPlannerROS/xy_goal_tolerance: 0.2
* /move_base/TrajectoryPlannerROS/yaw_goal_tolerance: 0.2
* /move_base/base_global_planner: navfn/NavfnROS
* /move_base/clearing_rotation_allowed: True
* /move_base/controller_frequency: 10.0
* /move_base/controller_patience: 5.0
* /move_base/global_costmap/always_send_full_costmap: False
* /move_base/global_costmap/cost_scaling_factor: 5.0
* /move_base/global_costmap/footprint: [[0.31, 0.25], [-...
* /move_base/global_costmap/footprint_padding: 0.03
* /move_base/global_costmap/global_frame: map
* /move_base/global_costmap/inflation_layer/inflation_radius: 1.1
* /move_base/global_costmap/obstacle_layer/laser_scan_sensor/clearing: True
* /move_base/global_costmap/obstacle_layer/laser_scan_sensor/data_type: LaserScan
* /move_base/global_costmap/obstacle_layer/laser_scan_sensor/expected_update_rate: 0.1
* /move_base/global_costmap/obstacle_layer/laser_scan_sensor/marking: True
* /move_base/global_costmap/obstacle_layer/laser_scan_sensor/topic: scan
* /move_base/global_costmap/obstacle_layer/max_obstacle_height: 0.4
* /move_base/global_costmap/obstacle_layer/observation_sources: laser_scan_sensor...
* /move_base/global_costmap/obstacle_layer/obstacle_range: 2
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/clearing: True
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/data_type: PointCloud2
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/expected_update_rate: 1.0
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/marking: True
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/min_obstacle_height: 0.04
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/sensor_frame: base_footprint
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/topic: obstacles_cloud
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/clearing: True
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/data_type: PointCloud2
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/expected_update_rate: 1.0
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/marking: False
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/min_obstacle_height: -1.0
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/sensor_frame: base_footprint
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/topic: ground_cloud
* /move_base/global_costmap/obstacle_layer/raytrace_range: 3
* /move_base/global_costmap/obstacle_layer/track_unknown_space: True
* /move_base/global_costmap/plugins: [{'type': 'rtabma...
* /move_base/global_costmap/publish_frequency: 1
* /move_base/global_costmap/robot_base_frame: base_footprint
* /move_base/global_costmap/transform_tolerance: 0.5
* /move_base/global_costmap/update_frequency: 1
* /move_base/local_costmap/cost_scaling_factor: 5.0
* /move_base/local_costmap/footprint: [[0.31, 0.25], [-...
* /move_base/local_costmap/footprint_padding: 0.03
* /move_base/local_costmap/global_frame: hector_map
* /move_base/local_costmap/height: 3.0
* /move_base/local_costmap/inflation_layer/inflation_radius: 1.1
* /move_base/local_costmap/obstacle_layer/laser_scan_sensor/clearing: True
* /move_base/local_costmap/obstacle_layer/laser_scan_sensor/data_type: LaserScan
* /move_base/local_costmap/obstacle_layer/laser_scan_sensor/expected_update_rate: 0.1
* /move_base/local_costmap/obstacle_layer/laser_scan_sensor/marking: True
* /move_base/local_costmap/obstacle_layer/laser_scan_sensor/topic: scan
* /move_base/local_costmap/obstacle_layer/max_obstacle_height: 0.4
* /move_base/local_costmap/obstacle_layer/observation_sources: laser_scan_sensor...
* /move_base/local_costmap/obstacle_layer/obstacle_range: 2
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/clearing: True
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/data_type: PointCloud2
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/expected_update_rate: 1.0
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/marking: True
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/min_obstacle_height: 0.04
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/sensor_frame: base_footprint
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/topic: obstacles_cloud
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/clearing: True
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/data_type: PointCloud2
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/expected_update_rate: 1.0
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/marking: False
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/min_obstacle_height: -1.0
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/sensor_frame: base_footprint
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/topic: ground_cloud
* /move_base/local_costmap/obstacle_layer/raytrace_range: 3
* /move_base/local_costmap/obstacle_layer/track_unknown_space: True
* /move_base/local_costmap/origin_x: 0
* /move_base/local_costmap/origin_y: 0
* /move_base/local_costmap/plugins: [{'type': 'costma...
* /move_base/local_costmap/publish_frequency: 2
* /move_base/local_costmap/resolution: 0.025
* /move_base/local_costmap/robot_base_frame: base_footprint
* /move_base/local_costmap/rolling_window: True
* /move_base/local_costmap/transform_tolerance: 0.5
* /move_base/local_costmap/update_frequency: 2
* /move_base/local_costmap/width: 3.0
* /move_base/planner_frequency: 0.0
* /move_base/planner_patience: 5.0
* /move_base/recovery_behavior_enabled: True
* /move_base/recovery_behaviors: [{'type': 'clear_...
* /move_base/stepback_and_steerturn_recovery/angular_speed_steer: 0.5
* /move_base/stepback_and_steerturn_recovery/linear_vel_back: -0.1
* /move_base/stepback_and_steerturn_recovery/linear_vel_forward: 0.1
* /move_base/stepback_and_steerturn_recovery/linear_vel_steer: 0.3
* /move_base/stepback_and_steerturn_recovery/obstacle_check_frequency: 5.0
* /move_base/stepback_and_steerturn_recovery/obstacle_patience: 0.3
* /move_base/stepback_and_steerturn_recovery/only_single_steering: True
* /move_base/stepback_and_steerturn_recovery/sim_angle_resolution: 0.1
* /move_base/stepback_and_steerturn_recovery/simulation_frequency: 5
* /move_base/stepback_and_steerturn_recovery/steering_timeout: 8.0
* /move_base/stepback_and_steerturn_recovery/step_back_length: 0.3
* /move_base/stepback_and_steerturn_recovery/step_back_timeout: 8.0
* /move_base/stepback_and_steerturn_recovery/step_forward_length: 1.0
* /move_base/stepback_and_steerturn_recovery/step_forward_timeout: 8.0
* /move_base/stepback_and_steerturn_recovery/trial_times: 3
* /move_base/stepback_and_steerturn_recovery/turn_angle: 1.5
* /move_base/straf_recovery/maximum_translate_distance: 0.1
* /move_base/straf_recovery/minimum_translate_distance: 0.05
* /move_base/straf_recovery/straf_vel: 0.05
* /move_base/straf_recovery/timeout: 2
* /points_xyzrgb/depth/image_transport: compressedDepth
* /points_xyzrgb/rgb/image_transport: compressed
* /points_xyzrgb/voxel_size: 0.01
* /robot_description: <?xml version="1....
* /rosdistro: kinetic
* /rosversion: 1.12.13
* /rtabmap/rtabmap/Grid/FromDepth: false
* /rtabmap/rtabmap/Icp/CorrespondenceRatio: 0.2
* /rtabmap/rtabmap/Kp/DetectorStrategy: 0
* /rtabmap/rtabmap/Kp/MaxFeatures: 200
* /rtabmap/rtabmap/Mem/IncrementalMemory: false
* /rtabmap/rtabmap/Optimizer/Strategy: 0
* /rtabmap/rtabmap/RGBD/OptimizeFromGraphEnd: true
* /rtabmap/rtabmap/RGBD/ProximityPathMaxNeighbors: 10
* /rtabmap/rtabmap/Reg/Force3DoF: true
* /rtabmap/rtabmap/Reg/Strategy: 1
* /rtabmap/rtabmap/SURF/HessianThreshold: 500
* /rtabmap/rtabmap/Vis/InlierDistance: 0.1
* /rtabmap/rtabmap/Vis/MaxDepth: 10.0
* /rtabmap/rtabmap/database_path: ~/catkin_ws/src/v...
* /rtabmap/rtabmap/frame_id: base_footprint
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_scan: True
* /teleop_velocity_smoother/accel_lim_v: 1.0
* /teleop_velocity_smoother/accel_lim_w: 2.0
* /teleop_velocity_smoother/decel_factor: 1.5
* /teleop_velocity_smoother/frequency: 20.0
* /teleop_velocity_smoother/robot_feedback: 2
* /teleop_velocity_smoother/speed_lim_v: 0.8
* /teleop_velocity_smoother/speed_lim_w: 5.4
* /turtlebot_teleop_joystick/axis_angular: 0
* /turtlebot_teleop_joystick/axis_deadman: 0
* /turtlebot_teleop_joystick/axis_linear: 1
* /turtlebot_teleop_joystick/scale_angular: 0.2
* /turtlebot_teleop_joystick/scale_linear: 0.1
* /use_sim_time: False
NODES
/camera/
camera_nodelet_manager (nodelet/nodelet)
data_throttle (nodelet/nodelet)
depth_metric (nodelet/nodelet)
depth_metric_rect (nodelet/nodelet)
depth_points (nodelet/nodelet)
depth_rectify_depth (nodelet/nodelet)
depth_registered_hw_metric_rect (nodelet/nodelet)
depth_registered_metric (nodelet/nodelet)
depth_registered_rectify_depth (nodelet/nodelet)
depth_registered_sw_metric_rect (nodelet/nodelet)
disparity_depth (nodelet/nodelet)
disparity_registered_hw (nodelet/nodelet)
disparity_registered_sw (nodelet/nodelet)
driver (nodelet/nodelet)
ir_rectify_ir (nodelet/nodelet)
obstacles_detection (nodelet/nodelet)
points_xyz_planner (nodelet/nodelet)
points_xyzrgb_hw_registered (nodelet/nodelet)
points_xyzrgb_sw_registered (nodelet/nodelet)
register_depth_rgb (nodelet/nodelet)
rgb_debayer (nodelet/nodelet)
rgb_rectify_color (nodelet/nodelet)
rgb_rectify_mono (nodelet/nodelet)
/rtabmap/
rtabmap (rtabmap_ros/rtabmap)
/
camera (tf/static_transform_publisher)
camera_base_link (tf2_ros/static_transform_publisher)
camera_base_link1 (tf2_ros/static_transform_publisher)
camera_base_link2 (tf2_ros/static_transform_publisher)
camera_base_link3 (tf2_ros/static_transform_publisher)
hector_mapping (hector_mapping/hector_mapping)
joystick (joy/joy_node)
laser (tf/static_transform_publisher)
lms1xx (lms1xx/LMS1xx_node)
move_base (move_base/move_base)
points_xyzrgb (nodelet/nodelet)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz (rviz/rviz)
scanmatcher_to_base_footprint (tf/static_transform_publisher)
teleop_velocity_smoother (nodelet/nodelet)
turtlebot_teleop_joystick (turtlebot_teleop/turtlebot_teleop_joy)
volksbot (volksbot_driver/volksbot)
auto-starting new master
process[master]: started with pid [7294]
ROS_MASTER_URI=http://10.12.13.220:11311
setting /run_id to bd63db2e-7c50-11e8-a65f-3c970eb9cf5e
process[rosout-1]: started with pid [7307]
started core service [/rosout]
process[camera/camera_nodelet_manager-2]: started with pid [7325]
process[camera/driver-3]: started with pid [7326]
process[camera/rgb_debayer-4]: started with pid [7327]
process[camera/rgb_rectify_mono-5]: started with pid [7333]
process[camera/rgb_rectify_color-6]: started with pid [7346]
process[camera/ir_rectify_ir-7]: started with pid [7362]
process[camera/depth_rectify_depth-8]: started with pid [7377]
process[camera/depth_metric_rect-9]: started with pid [7390]
[ INFO] [1530354686.393928953]: Initializing nodelet with 4 worker threads.
process[camera/depth_metric-10]: started with pid [7416]
process[camera/depth_points-11]: started with pid [7429]
process[camera/register_depth_rgb-12]: started with pid [7443]
process[camera/points_xyzrgb_sw_registered-13]: started with pid [7455]
process[camera/depth_registered_sw_metric_rect-14]: started with pid [7471]
[ INFO] [1530354686.444805352]: Number devices connected: 1
[ INFO] [1530354686.444869461]: 1. device on bus 000:00 is a Xbox NUI Camera (2ae) from Microsoft (45e) with serial id 'A70777V01080228A'
process[camera/depth_registered_rectify_depth-15]: started with pid [7486]
[ INFO] [1530354686.456866439]: Searching for device with index = 1
process[camera/points_xyzrgb_hw_registered-16]: started with pid [7495]
process[camera/depth_registered_hw_metric_rect-17]: started with pid [7510]
process[camera/depth_registered_metric-18]: started with pid [7519]
process[camera/disparity_depth-19]: started with pid [7530]
process[camera/disparity_registered_sw-20]: started with pid [7550]
process[camera/disparity_registered_hw-21]: started with pid [7561]
process[camera_base_link-22]: started with pid [7581]
process[camera_base_link1-23]: started with pid [7599]
process[camera_base_link2-24]: started with pid [7615]
process[camera_base_link3-25]: started with pid [7630]
process[lms1xx-26]: started with pid [7640]
process[robot_state_publisher-27]: started with pid [7649]
process[volksbot-28]: started with pid [7669]
process[camera-29]: started with pid [7680]
process[laser-30]: started with pid [7699]
process[teleop_velocity_smoother-31]: started with pid [7715]
process[turtlebot_teleop_joystick-32]: started with pid [7733]
process[joystick-33]: started with pid [7748]
process[scanmatcher_to_base_footprint-34]: started with pid [7765]
process[hector_mapping-35]: started with pid [7784]
process[rtabmap/rtabmap-36]: started with pid [7802]
process[move_base-37]: started with pid [7808]
process[rviz-38]: started with pid [7819]
process[points_xyzrgb-39]: started with pid [7827]
process[camera/data_throttle-40]: started with pid [7831]
process[camera/points_xyz_planner-41]: started with pid [7851]
process[camera/obstacles_detection-42]: started with pid [7870]
[ERROR] [1530354686.795187532]: Couldn't open joystick /dev/input/js0. Will retry every second.
[ INFO] [1530354686.844637945]: Starting node...
[ INFO] [1530354686.846734274]: rviz version 1.12.16
[ INFO] [1530354686.846793359]: compiled against Qt version 5.5.1
[ INFO] [1530354686.846825859]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1530354686.917624351]: Initializing nodelet with 8 worker threads.
HectorSM map lvl 0: cellLength: 0.05 res x:2048 res y: 2048
HectorSM map lvl 1: cellLength: 0.1 res x:1024 res y: 1024
[ INFO] [1530354687.028897541]: HectorSM p_base_frame_: base_footprint
[ INFO] [1530354687.029099950]: HectorSM p_map_frame_: hector_map
[ INFO] [1530354687.029436520]: HectorSM p_odom_frame_: odom
[ INFO] [1530354687.029675210]: HectorSM p_scan_topic_: /scan
[ INFO] [1530354687.029896288]: HectorSM p_use_tf_scan_transformation_: true
[ INFO] [1530354687.030098082]: HectorSM p_pub_map_odom_transform_: false
[ INFO] [1530354687.030123796]: HectorSM p_scan_subscriber_queue_size_: 5
[ INFO] [1530354687.030226552]: HectorSM p_map_pub_period_: 2.000000
[ INFO] [1530354687.030336259]: HectorSM p_update_factor_free_: 0.400000
[ INFO] [1530354687.030417076]: HectorSM p_update_factor_occupied_: 0.900000
[ INFO] [1530354687.030438893]: HectorSM p_map_update_distance_threshold_: 0.400000
[ INFO] [1530354687.030558111]: HectorSM p_map_update_angle_threshold_: 0.060000
[ INFO] [1530354687.030632255]: HectorSM p_laser_z_min_value_: -1.000000
[ INFO] [1530354687.030704360]: HectorSM p_laser_z_max_value_: 1.000000
[ INFO] [1530354687.194258240]: Stereo is NOT SUPPORTED
[ INFO] [1530354687.194382292]: OpenGl version: 3 (GLSL 1.3).
[ INFO] [1530354687.474752600]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1530354687.474801318]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1530354687.474835243]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1530354687.474875030]: /rtabmap/rtabmap(maps): map_negative_poses_ignored = true
[ INFO] [1530354687.474903339]: /rtabmap/rtabmap(maps): map_negative_scan_ray_tracing = true
[ INFO] [1530354687.474929818]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1530354687.474957378]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1530354687.474991044]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1530354687.483884900]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1530354687.540840012]: rtabmap: frame_id = base_footprint
[ INFO] [1530354687.540885431]: rtabmap: map_frame_id = map
[ INFO] [1530354687.540904588]: rtabmap: tf_delay = 0.050000
[ INFO] [1530354687.540930645]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1530354687.540955720]: rtabmap: odom_sensor_sync = false
[ INFO] [1530354687.760723695]: Setting RTAB-Map parameter "Grid/FromDepth"="false"
[ INFO] [1530354687.820092971]: Setting RTAB-Map parameter "Icp/CorrespondenceRatio"="0.2"
[ INFO] [1530354687.870237593]: Setting RTAB-Map parameter "Kp/DetectorStrategy"="0"
[ INFO] [1530354687.891288322]: Setting RTAB-Map parameter "Kp/MaxFeatures"="200"
[ INFO] [1530354687.939047094]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="false"
[ INFO] [1530354688.209660584]: Setting RTAB-Map parameter "Optimizer/Strategy"="0"
[ INFO] [1530354688.251151699]: Setting RTAB-Map parameter "RGBD/OptimizeFromGraphEnd"="true"
[ INFO] [1530354688.281923830]: Setting RTAB-Map parameter "RGBD/ProximityPathMaxNeighbors"="10"
[ INFO] [1530354688.287753754]: Setting RTAB-Map parameter "Reg/Force3DoF"="true"
[ INFO] [1530354688.290478514]: Setting RTAB-Map parameter "Reg/Strategy"="1"
Property::loadValue() TODO: error handling - unexpected QVariant type 0.
[ INFO] [1530354688.386503226]: Setting RTAB-Map parameter "SURF/HessianThreshold"="500"
[ INFO] [1530354688.408651602]: Rate=5.000000 Hz
[ INFO] [1530354688.408711880]: Decimation=2
[ INFO] [1530354688.408742540]: Approximate time sync = true
[ INFO] [1530354688.709981469]: Setting RTAB-Map parameter "Vis/InlierDistance"="0.1"
[ INFO] [1530354688.720112669]: Setting RTAB-Map parameter "Vis/MaxDepth"="10.0"
[ INFO] [1530354688.730189426]: Approximate time sync = true
[ INFO] [1530354689.436920174]: Setting "Grid/RangeMax" parameter to 0 (default 5.000000) as "subscribe_scan" or "subscribe_scan_cloud" is true.
[ INFO] [1530354689.441465389]: Update RTAB-Map parameter "Mem/UseOdomFeatures"="false" from database
[ INFO] [1530354689.470725728]: obstacles_detection: Setting parameter "Grid/MaxObstacleHeight"="0.4"
[ INFO] [1530354689.473902392]: obstacles_detection: Setting parameter "Grid/MinClusterSize"="20"
[ INFO] [1530354689.772782427]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1530354689.772930177]: rtabmap: Using database from "/home/roswitha/catkin_ws/src/volksbot_navstack/rtabmap.db" (282 MB).
[ INFO] [1530354691.519248214]: rtabmap: 2D occupancy grid map loaded.
[ INFO] [1530354691.519831284]: rtabmap: Database version = "0.17.3".
[ INFO] [1530354691.555944399]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1530354691.555988771]: /rtabmap/rtabmap: rgbd_cameras = 1
[ INFO] [1530354691.556016547]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1530354691.556088737]: Setup depth callback
[ INFO] [1530354691.599706152]:
/rtabmap/rtabmap subscribed to (approx sync):
/scanmatch_odom,
/camera/rgb/image_rect_color,
/camera/depth_registered/image_raw,
/camera/rgb/camera_info,
/scan
[ INFO] [1530354691.612535133]: rtabmap 0.17.3 started...
[ WARN] [1530354692.117568758]: Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100757 timeout was 0.1.
[ INFO] [1530354692.161322924]: Starting a 3s RGB and Depth stream flush.
[ INFO] [1530354692.161558366]: Opened 'Xbox NUI Camera' on bus 0:0 with serial number 'A70777V01080228A'
[ WARN] [1530354692.597352267]: Could not find any compatible depth output mode for 1. Falling back to default depth output mode 1.
[ INFO] [1530354692.610859635]: rgb_frame_id = 'camera_rgb_optical_frame'
[ INFO] [1530354692.610927699]: depth_frame_id = 'camera_depth_optical_frame'
[ WARN] [1530354692.622722082]: Camera calibration file /home/roswitha/.ros/camera_info/rgb_A70777V01080228A.yaml not found.
[ WARN] [1530354692.622985720]: Using default parameters for RGB camera calibration.
[ WARN] [1530354692.623248373]: Camera calibration file /home/roswitha/.ros/camera_info/depth_A70777V01080228A.yaml not found.
[ WARN] [1530354692.623423254]: Using default parameters for IR camera calibration.
[ WARN] (2018-06-30 12:31:34.216) Rtabmap.cpp:994::process() Update map correction based on last localization saved in database! correction = xyz=0.010760,0.007926,0.000000 rpy=0.000000,0.000000,-0.005287, nearest id = 26 of last pose = xyz=0.009041,0.002464,0.000000 rpy=0.000000,0.000000,-0.002377, odom = xyz=-0.001690,-0.005470,0.000000 rpy=0.000000,-0.000000,0.002910
[ INFO:0] Initialize OpenCL runtime...
[ WARN] (2018-06-30 12:31:34.353) Rtabmap.cpp:1920::process() Rejected loop closure 30 -> 804: Not enough inliers 18/20 (matches=31) between 30 and 804
[ WARN] [1530354694.485938690]: Many occupancy grids should be loaded (~577), this may take a while to update the map(s)...
[ INFO] [1530354694.653466788]: Using plugin "static_layer"
[ INFO] [1530354695.141878950]: Requesting the map...
[ WARN] [1530354695.259226597]: Map(s) updated! (0.773443 s)
[ INFO] [1530354695.261548914]: rtabmap (804): Rate=1.00s, Limit=0.000s, RTAB-Map=0.2438s, Maps update=0.8002s pub=0.0016s (local map=577, WM=577)
[ INFO] [1530354695.281012507]: Creating 1 swatches
[ INFO] [1530354695.285111999]: Stopping device RGB and Depth stream flush.
[ INFO] [1530354695.346428196]: Resizing costmap to 185 X 364 at 0.050000 m/pix
[ INFO] [1530354695.445403865]: Received a 185 X 364 map at 0.050000 m/pix
[ INFO] [1530354695.451558942]: Using plugin "obstacle_layer"
[ INFO] [1530354695.472342597]: Subscribed to Topics: laser_scan_sensor point_cloud_sensorA point_cloud_sensorB
[ INFO] [1530354695.553864188]: Using plugin "inflation_layer"
[ WARN] [1530354695.610822584]: The scan observation buffer has not been updated for 0.13 seconds, and it should be updated every 0.10 seconds.
[ INFO] [1530354695.643160363]: Using plugin "obstacle_layer"
[ INFO] [1530354695.646826665]: Subscribed to Topics: laser_scan_sensor point_cloud_sensorA point_cloud_sensorB
[ INFO] [1530354695.727834098]: Using plugin "inflation_layer"
[ WARN] [1530354695.780159772]: The scan observation buffer has not been updated for 0.12 seconds, and it should be updated every 0.10 seconds.
[ INFO] [1530354695.805618671]: Created local_planner base_local_planner/TrajectoryPlannerROS
[ INFO] [1530354695.820213610]: Sim period is set to 0.10
[ WARN] [1530354696.610809859]: The scan observation buffer has not been updated for 1.13 seconds, and it should be updated every 0.10 seconds.
[ WARN] [1530354696.610857628]: The obstacles_cloud observation buffer has not been updated for 1.10 seconds, and it should be updated every 1.00 seconds.
[ WARN] [1530354696.780241511]: The scan observation buffer has not been updated for 1.12 seconds, and it should be updated every 0.10 seconds.
[ WARN] [1530354696.780301033]: The obstacles_cloud observation buffer has not been updated for 1.09 seconds, and it should be updated every 1.00 seconds.
[ INFO] [1530354696.794136970]: Recovery behavior will clear layer obstacles
[ INFO] [1530354696.796992275]: Recovery behavior will clear layer obstacles
[ INFO] [1530354696.860910762]: odom received!
[ INFO] [1530354697.086307249]: rtabmap (805): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1856s, Maps update=0.0346s pub=0.0005s (local map=577, WM=577)
[ INFO] [1530354697.086547176]: Resizing costmap to 184 X 365 at 0.050000 m/pix
[ INFO] [1530354697.229817665]: Creating 1 swatches
[ INFO] [1530354698.341526388]: rtabmap (806): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1941s, Maps update=0.0392s pub=0.0005s (local map=577, WM=577)
[ INFO] [1530354698.341613179]: Resizing costmap to 182 X 365 at 0.050000 m/pix
[ INFO] [1530354698.506728335]: Creating 1 swatches
[ INFO] [1530354699.569617571]: rtabmap (807): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1593s, Maps update=0.0257s pub=0.0005s (local map=577, WM=577)
[ INFO] [1530354699.569745514]: Resizing costmap to 182 X 365 at 0.050000 m/pix
[ INFO] [1530354700.767878194]: Resizing costmap to 184 X 365 at 0.050000 m/pix
[ INFO] [1530354700.771395364]: rtabmap (808): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1739s, Maps update=0.0333s pub=0.0040s (local map=577, WM=577)
[ INFO] [1530354700.917670753]: Creating 1 swatches
[ INFO] [1530354701.918004274]: Resizing costmap to 181 X 365 at 0.050000 m/pix
[ INFO] [1530354701.918004678]: rtabmap (809): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1679s, Maps update=0.0344s pub=0.0005s (local map=577, WM=577)
[ INFO] [1530354702.049818906]: Creating 1 swatches
[ INFO] [1530354703.104275297]: rtabmap (810): Rate=1.00s, Limit=0.000s, RTAB-Map=0.2070s, Maps update=0.0358s pub=0.0003s (local map=577, WM=577)
[ INFO] [1530354703.104446373]: Resizing costmap to 182 X 365 at 0.050000 m/pix
[ INFO] [1530354703.248805258]: Creating 1 swatches
[ INFO] [1530354704.271465364]: Resizing costmap to 182 X 365 at 0.050000 m/pix
[ INFO] [1530354704.274411289]: rtabmap (811): Rate=1.00s, Limit=0.000s, RTAB-Map=0.2143s, Maps update=0.0328s pub=0.0033s (local map=577, WM=577)
[ INFO] [1530354705.525346028]: Resizing costmap to 182 X 365 at 0.050000 m/pix
[ INFO] [1530354705.525356758]: rtabmap (812): Rate=1.00s, Limit=0.000s, RTAB-Map=0.2182s, Maps update=0.0361s pub=0.0005s (local map=577, WM=577)
[ INFO] [1530354707.110437629]: Resizing costmap to 184 X 365 at 0.050000 m/pix
[ INFO] [1530354707.110447232]: rtabmap (813): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1919s, Maps update=0.0337s pub=0.0007s (local map=577, WM=577)
[ INFO] [1530354707.256015445]: Creating 1 swatches
[ INFO] [1530354708.255108372]: rtabmap (814): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1844s, Maps upd
URL: http://official-rtab-map-forum.206.s1.nabble.com/2D-occupancy-grid-map-does-not-show-when-using-existing-map-to-navigate-tp4719.html
Hi Mathieu,
I am doing a project, in which the robot will use existing 2D and 3D map to autonomously navigate through the environment. I have successfully be able to create 3D and 2D map using rtabmap. When I drive robot around for making maps, I saw 2D and 3D maps appear on RVIZ. I also check again by using rtabmap-databaseViewer. Everything is ok. However, when I use localization mode of rtabmap, that is, I use existing maps for navigation, the 2D map does not appear on RVIZ. 3D map appears when I click Download map from MapCloud. I have read tutorials and many of your comments, saying that 2D map will automatically appear on RVIZ as soon as robot is able to find relocalize itself. And I am pretty sure that the robot is already able to localize itself when I turn program up, because location of robot in 3D map is correct. I would really appreciate if you know what happens. Here is my RVIZ when I run program
I am able to navigate through the map just by clicking 2D Nav goal and click point on the large blue rectangle beneath the 3D map. But when I click somewhere that is not in the blue rectangle, but still in 3D maps, the plan will fail, output the message:
The goal sent to the navfn planner is off the global costmap. Planning will always fail to this goal.
I want to ask if 2D occupancy grid map is used for navigation ?????? I guess that it is used because as far as I know, navigation stack only use 2D map , not 3D. But if it is used, why does it not appear on RVIZ ?????
Here is my code
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%"><launch>
<!-- Localization-only mode -->
<arg name="localization" default="false"/>
<arg if="$(arg localization)" name="rtabmap_args" default=""/>
<arg unless="$(arg localization)" name="rtabmap_args" default="--delete_db_on_start"/>
<arg if="$(arg localization)" name="increment_memory" default="false"/>
<arg unless="$(arg localization)" name="increment_memory" default="true"/>
<arg name="database_path" default="~/.ros/rtabmap.db"/>
<!-- Volksbot 3 bringup: launch motors/odometry -->
<include file="$(find freenect_launch)/launch/freenect.launch">
<arg name="depth_registration" value="True" />
</include>
<include file="$(find lms1xx)launch/LMS1xx.launch"/>
<include file="$(find volksbot_driver)launch/volksbot.launch"/>
<node pkg="tf" type="static_transform_publisher" name="camera"
args="0 0 0 0 0 0 base_link camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="laser"
args="0 0 0 0 0 0 base_link laser 100" />
<!-- teleop -->
<include file="$(find turtlebot_teleop)/launch/includes/velocity_smoother.launch.xml"/>
<node pkg="turtlebot_teleop" type="turtlebot_teleop_joy" name="turtlebot_teleop_joystick">
<param name="scale_angular" value="0.2"/>
<param name="scale_linear" value="0.1"/>
<param name="axis_deadman" value="0"/>
<param name="axis_linear" value="1"/>
<param name="axis_angular" value="0"/>
<remap from="turtlebot_teleop_joystick/cmd_vel" to="cmd_vel"/>
</node>
<node pkg="joy" type="joy_node" name="joystick"/>
<!-- HECTOR MAPPING VERSION: use this with ROS bag demo_mapping_no_odom.bag generated -->
<!-- Choose visualization -->
<arg name="rviz" default="true" />
<arg name="rtabmapviz" default="false" />
<param name="use_sim_time" type="bool" value="false"/>
<node pkg="tf" type="static_transform_publisher" name="scanmatcher_to_base_footprint"
args="0.0 0.0 0.0 0.0 0.0 0.0 /scanmatcher_frame /base_footprint 100" />
<!-- Odometry from laser scans -->
<!-- We use Hector mapping to generate odometry for us -->
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="map_frame" value="hector_map" />
<param name="base_frame" value="base_footprint" />
<param name="odom_frame" value="odom" />
<!-- Tf use -->
<param name="pub_map_odom_transform" value="false"/>
<param name="pub_map_scanmatch_transform" value="true"/>
<param name="pub_odometry" value="true"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.050"/>
<param name="map_size" value="2048"/>
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="scan_topic" value="/scan"/>
</node>
<group ns="rtabmap">
<!-- SLAM (robot side) -->
<!-- args: "delete_db_on_start" and "udebug" -->
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="$(arg rtabmap_args)">
<param name="frame_id" type="string" value="base_footprint"/>
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_scan" type="bool" value="true"/>
<remap from="odom" to="/scanmatch_odom"/>
<remap from="scan" to="/scan"/>
<remap from="mapData" to="mapData"/>
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="goal_out" to="/move_base_simple/goal"/>
<remap from="move_base" to="/planner/move_base"/>
<remap from="grid_map" to="/rtabmap/grid_map"/>
<param name="database_path" type="string" value="$(arg database_path)"/>
<!-- RTAB-Map's parameters -->
<param name="Reg/Strategy" type="string" value="1"/> <!-- 0=Visual, 1=ICP, 2=Visual+ICP -->
<param name="Vis/MaxDepth" type="string" value="10.0"/> <!-- 3D visual words maximum depth 0=infinity -->
<param name="Vis/InlierDistance" type="string" value="0.1"/> <!-- 3D visual words correspondence distance -->
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="Grid/FromDepth" type="string" value="false"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="true"/>
<param name="Optimizer/Strategy" type="string" value="0"/>
<param name="Kp/DetectorStrategy" type="string" value="0"/>
<param name="Kp/MaxFeatures" type="string" value="200"/>
<param name="SURF/HessianThreshold" type="string" value="500"/>
<param name="Icp/CorrespondenceRatio" type="string" value="0.2"/>
<param name="RGBD/ProximityPathMaxNeighbors" type="string" value="10"/>
<param name="Mem/IncrementalMemory" type="string" value="$(arg increment_memory)"/>
</node>
<!-- Visualisation RTAB-Map -->
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_laserScan" type="bool" value="true"/>
<param name="frame_id" type="string" value="base_footprint"/>
<remap from="rgb/image" to="/camera/rgb/image_raw"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="scan" to="/scan"/>
<remap from="odom" to="/scanmatch_odom"/>
<param name="rgb/image_transport" type="string" value="compressed"/>
<param name="depth/image_transport" type="string" value="compressedDepth"/>
</node>
</group>
<!-- ROS navigation stack move_base -->
<remap from="odom" to="/scanmatch_odom"/>
<remap from="scan" to="/scan"/>
<remap from="obstacles_cloud" to="/obstacles_cloud"/>
<remap from="ground_cloud" to="/ground_cloud"/>
<remap from="map" to="/rtabmap/grid_map"/>
<node pkg="move_base" type="move_base" respawn="true" name="move_base" output="screen">
<param name="base_global_planner" value="navfn/NavfnROS"/>
<rosparam file="$(find volksbot_navstack)/costmap_usethis/costmap_common_params_2d.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find volksbot_navstack)/costmap_usethis/costmap_common_params_2d.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find volksbot_navstack)/costmap_usethis/local_costmap_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find volksbot_navstack)/costmap_usethis/global_costmap_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find volksbot_navstack)/costmap_usethis/base_local_planner_params.yaml" command="load" />
<rosparam file="$(find volksbot_navstack)/costmap_usethis/move_base_params.yaml" command="load" />
</node>
<!-- Visualisation RVIZ -->
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/azimut3/config/azimut3_nav.rviz" output="screen"/>
<node pkg="nodelet" type="nodelet" name="points_xyzrgb" args="standalone rtabmap_ros/point_cloud_xyzrgb">
<remap from="rgb/image" to="/camera/rgb/image_raw"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="cloud" to="voxel_cloud" />
<param name="rgb/image_transport" type="string" value="compressed"/>
<param name="depth/image_transport" type="string" value="compressedDepth"/>
<param name="voxel_size" type="double" value="0.01"/>
</node>
<!-- Throttling messages -->
<group ns="camera">
<node pkg="nodelet" type="nodelet" name="data_throttle" args="load rtabmap_ros/data_throttle camera_nodelet_manager">
<param name="rate" type="double" value="5"/>
<param name="decimation" type="int" value="2"/>
<remap from="rgb/image_in" to="rgb/image_rect_color"/>
<remap from="depth/image_in" to="depth_registered/image_raw"/>
<remap from="rgb/camera_info_in" to="depth_registered/camera_info"/>
<remap from="rgb/image_out" to="data_resized_image"/>
<remap from="depth/image_out" to="data_resized_image_depth"/>
<remap from="rgb/camera_info_out" to="data_resized_camera_info"/>
</node>
<!-- for the planner -->
<node pkg="nodelet" type="nodelet" name="points_xyz_planner" args="load rtabmap_ros/point_cloud_xyz camera_nodelet_manager">
<remap from="depth/image" to="data_resized_image_depth"/>
<remap from="depth/camera_info" to="data_resized_camera_info"/>
<remap from="cloud" to="cloudXYZ" />
<param name="decimation" type="int" value="1"/> <!-- already decimated above -->
<param name="max_depth" type="double" value="3.0"/>
<param name="voxel_size" type="double" value="0.02"/>
</node>
<node pkg="nodelet" type="nodelet" name="obstacles_detection" args="load rtabmap_ros/obstacles_detection camera_nodelet_manager">
<remap from="cloud" to="cloudXYZ"/>
<remap from="obstacles" to="/obstacles_cloud"/>
<remap from="ground" to="/ground_cloud"/>
<param name="frame_id" type="string" value="base_footprint"/>
<param name="map_frame_id" type="string" value="map"/>
<param name="wait_for_transform" type="bool" value="true"/>
<param name="Grid/MinClusterSize" type="int" value="20"/>
<param name="Grid/MaxObstacleHeight" type="double" value="0.4"/>
</node>
</group>
</launch>
</pre></div>
I also would like to provide yaml file for move_base, just in case you need some review:
global_costmap_params.yaml:
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%">#global_costmap
global_frame: map
robot_base_frame: base_footprint
update_frequency: 1
publish_frequency: 1
always_send_full_costmap: false
plugins:
- {name: static_layer, type: "rtabmap_ros::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
</pre></div>
local_costmap_params.yaml:
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%">global_frame: hector_map
robot_base_frame: base_footprint
update_frequency: 2
publish_frequency: 2
rolling_window: true
width: 3.0
height: 3.0
resolution: 0.025
origin_x: 0
origin_y: 0
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
</pre></div>
costmap_commons_params_2d.yaml:
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%">footprint: [[ 0.31, 0.25], [-0.31, 0.25], [-0.31, -0.25], [ 0.31, -0.25], [0.31, -0.07], [0.46, -0.07], [0.46, 0.07], [0.31, 0.07]]
footprint_padding: 0.03
inflation_layer:
inflation_radius: 1.1 # 2xfootprint, it helps to keep the global planned path farther from obstacles
transform_tolerance: 0.5
cost_scaling_factor: 5.0
obstacle_layer:
obstacle_range: 2
raytrace_range: 3
max_obstacle_height: 0.4
track_unknown_space: true
observation_sources: laser_scan_sensor point_cloud_sensorA point_cloud_sensorB
laser_scan_sensor: {
data_type: LaserScan,
topic: scan,
expected_update_rate: 0.1,
marking: true,
clearing: true
}
point_cloud_sensorA: {
sensor_frame: base_footprint,
data_type: PointCloud2,
topic: obstacles_cloud,
expected_update_rate: 1.0,
marking: true,
clearing: true,
min_obstacle_height: 0.04
}
point_cloud_sensorB: {
sensor_frame: base_footprint,
data_type: PointCloud2,
topic: ground_cloud,
expected_update_rate: 1.0,
marking: false,
clearing: true,
min_obstacle_height: -1.0 # make sure the ground is not filtered
}
</pre></div>
base_local_planner_params.yaml:
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%">TrajectoryPlannerROS:
# Current limits based on AZ3 standalone configuration.
acc_lim_x: 0.65
acc_lim_y: 0.65
acc_lim_theta: 1.0
# min_vel_x and max_rotational_vel were set to keep the ICR at
# minimal distance of 0.48 m.
# Basically, max_rotational_vel * rho_min <= min_vel_x
max_vel_x: 0.3
min_vel_x: 0.06
max_vel_theta: 0.1
min_vel_theta: -0.1
min_in_place_vel_theta: 0.2
holonomic_robot: false
xy_goal_tolerance: 0.2
yaw_goal_tolerance: 0.2
latch_xy_goal_tolerance: true
# make sure that the minimum velocity multiplied by the sim_period is less than twice the tolerance on a goal. Otherwise, the robot will prefer to rotate in place just outside of range of its target position rather than moving towards the goal.
sim_time: 1.5 # set between 1 and 2. The higher he value, the smoother the path (though more samples would be required).
sim_granularity: 0.025
angular_sim_granularity: 0.05
vx_samples: 12
vtheta_samples: 20
meter_scoring: true
pdist_scale: 0.6 # The higher will follow more the global path.
gdist_scale: 0.8
occdist_scale: 0.01
publish_cost_grid_pc: false
#move_base
controller_frequency: 12.0 #The robot can move faster when higher.
#global planner
NavfnROS:
allow_unknown: true
visualize_potential: false
</pre></div>
move_base_params.yaml:
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%">controller_frequency: 10.0
controller_patience: 5.0
planner_frequency: 0.0
planner_patience: 5.0
#oscillation_timeout: 10.0
recovery_behavior_enabled: true
clearing_rotation_allowed: true
recovery_behaviors:
- {name: conservative_reset, type: clear_costmap_recovery/ClearCostmapRecovery}
# - {name: rotate_recovery, type: rotate_recovery/RotateRecovery}
# - {name: straf_recovery, type: straf_recovery/StrafRecovery}
# - {name: stepback_and_steerturn_recovery, type: stepback_and_steerturn_recovery/StepBackAndSteerTurnRecovery}
- {name: aggressive_reset, type: clear_costmap_recovery/ClearCostmapRecovery}
straf_recovery:
timeout: 2
minimum_translate_distance: 0.05
maximum_translate_distance: 0.10
straf_vel: 0.05
stepback_and_steerturn_recovery:
only_single_steering: true
trial_times: 3
obstacle_patience: 0.3
obstacle_check_frequency: 5.0
sim_angle_resolution: 0.1
simulation_frequency: 5
linear_vel_back : -0.1
step_back_length : 0.3
step_back_timeout : 8.0
linear_vel_steer : 0.3
angular_speed_steer : 0.5
turn_angle : 1.5
steering_timeout : 8.0
linear_vel_forward : 0.1
step_forward_length : 1.0
step_forward_timeout: 8.0
</pre></div>
roswitha@roswitha:~$ roslaunch volksbot_navstack rtab_hector_nav.launch database_path:="~/catkin_ws/src/volksbot_navstack/rtabmap.db" localization:=true
... logging to /home/roswitha/.ros/log/bd63db2e-7c50-11e8-a65f-3c970eb9cf5e/roslaunch-roswitha-7281.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order
xacro.py is deprecated; please use xacro instead
started roslaunch server http://10.12.13.220:45855/
SUMMARY
========
PARAMETERS
* /camera/camera_nodelet_manager/num_worker_threads: 4
* /camera/data_throttle/decimation: 2
* /camera/data_throttle/rate: 5.0
* /camera/depth_rectify_depth/interpolation: 0
* /camera/depth_registered_rectify_depth/interpolation: 0
* /camera/disparity_depth/max_range: 4.0
* /camera/disparity_depth/min_range: 0.5
* /camera/disparity_registered_hw/max_range: 4.0
* /camera/disparity_registered_hw/min_range: 0.5
* /camera/disparity_registered_sw/max_range: 4.0
* /camera/disparity_registered_sw/min_range: 0.5
* /camera/driver/data_skip: 0
* /camera/driver/debug: False
* /camera/driver/depth_camera_info_url:
* /camera/driver/depth_frame_id: camera_depth_opti...
* /camera/driver/depth_registration: True
* /camera/driver/device_id: #1
* /camera/driver/diagnostics_max_frequency: 30.0
* /camera/driver/diagnostics_min_frequency: 30.0
* /camera/driver/diagnostics_tolerance: 0.05
* /camera/driver/diagnostics_window_time: 5.0
* /camera/driver/enable_depth_diagnostics: False
* /camera/driver/enable_ir_diagnostics: False
* /camera/driver/enable_rgb_diagnostics: False
* /camera/driver/rgb_camera_info_url:
* /camera/driver/rgb_frame_id: camera_rgb_optica...
* /camera/obstacles_detection/Grid/MaxObstacleHeight: 0.4
* /camera/obstacles_detection/Grid/MinClusterSize: 20
* /camera/obstacles_detection/frame_id: base_footprint
* /camera/obstacles_detection/map_frame_id: map
* /camera/obstacles_detection/wait_for_transform: True
* /camera/points_xyz_planner/decimation: 1
* /camera/points_xyz_planner/max_depth: 3.0
* /camera/points_xyz_planner/voxel_size: 0.02
* /hector_mapping/base_frame: base_footprint
* /hector_mapping/map_frame: hector_map
* /hector_mapping/map_multi_res_levels: 2
* /hector_mapping/map_resolution: 0.05
* /hector_mapping/map_size: 2048
* /hector_mapping/map_update_angle_thresh: 0.06
* /hector_mapping/odom_frame: odom
* /hector_mapping/pub_map_odom_transform: False
* /hector_mapping/pub_map_scanmatch_transform: True
* /hector_mapping/pub_odometry: True
* /hector_mapping/scan_topic: /scan
* /lms1xx/host: 10.12.184.173
* /move_base/NavfnROS/allow_unknown: True
* /move_base/NavfnROS/visualize_potential: False
* /move_base/TrajectoryPlannerROS/acc_lim_theta: 1.0
* /move_base/TrajectoryPlannerROS/acc_lim_x: 0.65
* /move_base/TrajectoryPlannerROS/acc_lim_y: 0.65
* /move_base/TrajectoryPlannerROS/angular_sim_granularity: 0.05
* /move_base/TrajectoryPlannerROS/gdist_scale: 0.8
* /move_base/TrajectoryPlannerROS/holonomic_robot: False
* /move_base/TrajectoryPlannerROS/latch_xy_goal_tolerance: True
* /move_base/TrajectoryPlannerROS/max_vel_theta: 0.1
* /move_base/TrajectoryPlannerROS/max_vel_x: 0.3
* /move_base/TrajectoryPlannerROS/meter_scoring: True
* /move_base/TrajectoryPlannerROS/min_in_place_vel_theta: 0.2
* /move_base/TrajectoryPlannerROS/min_vel_theta: -0.1
* /move_base/TrajectoryPlannerROS/min_vel_x: 0.06
* /move_base/TrajectoryPlannerROS/occdist_scale: 0.01
* /move_base/TrajectoryPlannerROS/pdist_scale: 0.6
* /move_base/TrajectoryPlannerROS/publish_cost_grid_pc: False
* /move_base/TrajectoryPlannerROS/sim_granularity: 0.025
* /move_base/TrajectoryPlannerROS/sim_time: 1.5
* /move_base/TrajectoryPlannerROS/vtheta_samples: 20
* /move_base/TrajectoryPlannerROS/vx_samples: 12
* /move_base/TrajectoryPlannerROS/xy_goal_tolerance: 0.2
* /move_base/TrajectoryPlannerROS/yaw_goal_tolerance: 0.2
* /move_base/base_global_planner: navfn/NavfnROS
* /move_base/clearing_rotation_allowed: True
* /move_base/controller_frequency: 10.0
* /move_base/controller_patience: 5.0
* /move_base/global_costmap/always_send_full_costmap: False
* /move_base/global_costmap/cost_scaling_factor: 5.0
* /move_base/global_costmap/footprint: [[0.31, 0.25], [-...
* /move_base/global_costmap/footprint_padding: 0.03
* /move_base/global_costmap/global_frame: map
* /move_base/global_costmap/inflation_layer/inflation_radius: 1.1
* /move_base/global_costmap/obstacle_layer/laser_scan_sensor/clearing: True
* /move_base/global_costmap/obstacle_layer/laser_scan_sensor/data_type: LaserScan
* /move_base/global_costmap/obstacle_layer/laser_scan_sensor/expected_update_rate: 0.1
* /move_base/global_costmap/obstacle_layer/laser_scan_sensor/marking: True
* /move_base/global_costmap/obstacle_layer/laser_scan_sensor/topic: scan
* /move_base/global_costmap/obstacle_layer/max_obstacle_height: 0.4
* /move_base/global_costmap/obstacle_layer/observation_sources: laser_scan_sensor...
* /move_base/global_costmap/obstacle_layer/obstacle_range: 2
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/clearing: True
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/data_type: PointCloud2
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/expected_update_rate: 1.0
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/marking: True
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/min_obstacle_height: 0.04
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/sensor_frame: base_footprint
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorA/topic: obstacles_cloud
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/clearing: True
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/data_type: PointCloud2
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/expected_update_rate: 1.0
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/marking: False
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/min_obstacle_height: -1.0
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/sensor_frame: base_footprint
* /move_base/global_costmap/obstacle_layer/point_cloud_sensorB/topic: ground_cloud
* /move_base/global_costmap/obstacle_layer/raytrace_range: 3
* /move_base/global_costmap/obstacle_layer/track_unknown_space: True
* /move_base/global_costmap/plugins: [{'type': 'rtabma...
* /move_base/global_costmap/publish_frequency: 1
* /move_base/global_costmap/robot_base_frame: base_footprint
* /move_base/global_costmap/transform_tolerance: 0.5
* /move_base/global_costmap/update_frequency: 1
* /move_base/local_costmap/cost_scaling_factor: 5.0
* /move_base/local_costmap/footprint: [[0.31, 0.25], [-...
* /move_base/local_costmap/footprint_padding: 0.03
* /move_base/local_costmap/global_frame: hector_map
* /move_base/local_costmap/height: 3.0
* /move_base/local_costmap/inflation_layer/inflation_radius: 1.1
* /move_base/local_costmap/obstacle_layer/laser_scan_sensor/clearing: True
* /move_base/local_costmap/obstacle_layer/laser_scan_sensor/data_type: LaserScan
* /move_base/local_costmap/obstacle_layer/laser_scan_sensor/expected_update_rate: 0.1
* /move_base/local_costmap/obstacle_layer/laser_scan_sensor/marking: True
* /move_base/local_costmap/obstacle_layer/laser_scan_sensor/topic: scan
* /move_base/local_costmap/obstacle_layer/max_obstacle_height: 0.4
* /move_base/local_costmap/obstacle_layer/observation_sources: laser_scan_sensor...
* /move_base/local_costmap/obstacle_layer/obstacle_range: 2
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/clearing: True
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/data_type: PointCloud2
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/expected_update_rate: 1.0
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/marking: True
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/min_obstacle_height: 0.04
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/sensor_frame: base_footprint
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorA/topic: obstacles_cloud
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/clearing: True
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/data_type: PointCloud2
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/expected_update_rate: 1.0
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/marking: False
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/min_obstacle_height: -1.0
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/sensor_frame: base_footprint
* /move_base/local_costmap/obstacle_layer/point_cloud_sensorB/topic: ground_cloud
* /move_base/local_costmap/obstacle_layer/raytrace_range: 3
* /move_base/local_costmap/obstacle_layer/track_unknown_space: True
* /move_base/local_costmap/origin_x: 0
* /move_base/local_costmap/origin_y: 0
* /move_base/local_costmap/plugins: [{'type': 'costma...
* /move_base/local_costmap/publish_frequency: 2
* /move_base/local_costmap/resolution: 0.025
* /move_base/local_costmap/robot_base_frame: base_footprint
* /move_base/local_costmap/rolling_window: True
* /move_base/local_costmap/transform_tolerance: 0.5
* /move_base/local_costmap/update_frequency: 2
* /move_base/local_costmap/width: 3.0
* /move_base/planner_frequency: 0.0
* /move_base/planner_patience: 5.0
* /move_base/recovery_behavior_enabled: True
* /move_base/recovery_behaviors: [{'type': 'clear_...
* /move_base/stepback_and_steerturn_recovery/angular_speed_steer: 0.5
* /move_base/stepback_and_steerturn_recovery/linear_vel_back: -0.1
* /move_base/stepback_and_steerturn_recovery/linear_vel_forward: 0.1
* /move_base/stepback_and_steerturn_recovery/linear_vel_steer: 0.3
* /move_base/stepback_and_steerturn_recovery/obstacle_check_frequency: 5.0
* /move_base/stepback_and_steerturn_recovery/obstacle_patience: 0.3
* /move_base/stepback_and_steerturn_recovery/only_single_steering: True
* /move_base/stepback_and_steerturn_recovery/sim_angle_resolution: 0.1
* /move_base/stepback_and_steerturn_recovery/simulation_frequency: 5
* /move_base/stepback_and_steerturn_recovery/steering_timeout: 8.0
* /move_base/stepback_and_steerturn_recovery/step_back_length: 0.3
* /move_base/stepback_and_steerturn_recovery/step_back_timeout: 8.0
* /move_base/stepback_and_steerturn_recovery/step_forward_length: 1.0
* /move_base/stepback_and_steerturn_recovery/step_forward_timeout: 8.0
* /move_base/stepback_and_steerturn_recovery/trial_times: 3
* /move_base/stepback_and_steerturn_recovery/turn_angle: 1.5
* /move_base/straf_recovery/maximum_translate_distance: 0.1
* /move_base/straf_recovery/minimum_translate_distance: 0.05
* /move_base/straf_recovery/straf_vel: 0.05
* /move_base/straf_recovery/timeout: 2
* /points_xyzrgb/depth/image_transport: compressedDepth
* /points_xyzrgb/rgb/image_transport: compressed
* /points_xyzrgb/voxel_size: 0.01
* /robot_description: <?xml version="1....
* /rosdistro: kinetic
* /rosversion: 1.12.13
* /rtabmap/rtabmap/Grid/FromDepth: false
* /rtabmap/rtabmap/Icp/CorrespondenceRatio: 0.2
* /rtabmap/rtabmap/Kp/DetectorStrategy: 0
* /rtabmap/rtabmap/Kp/MaxFeatures: 200
* /rtabmap/rtabmap/Mem/IncrementalMemory: false
* /rtabmap/rtabmap/Optimizer/Strategy: 0
* /rtabmap/rtabmap/RGBD/OptimizeFromGraphEnd: true
* /rtabmap/rtabmap/RGBD/ProximityPathMaxNeighbors: 10
* /rtabmap/rtabmap/Reg/Force3DoF: true
* /rtabmap/rtabmap/Reg/Strategy: 1
* /rtabmap/rtabmap/SURF/HessianThreshold: 500
* /rtabmap/rtabmap/Vis/InlierDistance: 0.1
* /rtabmap/rtabmap/Vis/MaxDepth: 10.0
* /rtabmap/rtabmap/database_path: ~/catkin_ws/src/v...
* /rtabmap/rtabmap/frame_id: base_footprint
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_scan: True
* /teleop_velocity_smoother/accel_lim_v: 1.0
* /teleop_velocity_smoother/accel_lim_w: 2.0
* /teleop_velocity_smoother/decel_factor: 1.5
* /teleop_velocity_smoother/frequency: 20.0
* /teleop_velocity_smoother/robot_feedback: 2
* /teleop_velocity_smoother/speed_lim_v: 0.8
* /teleop_velocity_smoother/speed_lim_w: 5.4
* /turtlebot_teleop_joystick/axis_angular: 0
* /turtlebot_teleop_joystick/axis_deadman: 0
* /turtlebot_teleop_joystick/axis_linear: 1
* /turtlebot_teleop_joystick/scale_angular: 0.2
* /turtlebot_teleop_joystick/scale_linear: 0.1
* /use_sim_time: False
NODES
/camera/
camera_nodelet_manager (nodelet/nodelet)
data_throttle (nodelet/nodelet)
depth_metric (nodelet/nodelet)
depth_metric_rect (nodelet/nodelet)
depth_points (nodelet/nodelet)
depth_rectify_depth (nodelet/nodelet)
depth_registered_hw_metric_rect (nodelet/nodelet)
depth_registered_metric (nodelet/nodelet)
depth_registered_rectify_depth (nodelet/nodelet)
depth_registered_sw_metric_rect (nodelet/nodelet)
disparity_depth (nodelet/nodelet)
disparity_registered_hw (nodelet/nodelet)
disparity_registered_sw (nodelet/nodelet)
driver (nodelet/nodelet)
ir_rectify_ir (nodelet/nodelet)
obstacles_detection (nodelet/nodelet)
points_xyz_planner (nodelet/nodelet)
points_xyzrgb_hw_registered (nodelet/nodelet)
points_xyzrgb_sw_registered (nodelet/nodelet)
register_depth_rgb (nodelet/nodelet)
rgb_debayer (nodelet/nodelet)
rgb_rectify_color (nodelet/nodelet)
rgb_rectify_mono (nodelet/nodelet)
/rtabmap/
rtabmap (rtabmap_ros/rtabmap)
/
camera (tf/static_transform_publisher)
camera_base_link (tf2_ros/static_transform_publisher)
camera_base_link1 (tf2_ros/static_transform_publisher)
camera_base_link2 (tf2_ros/static_transform_publisher)
camera_base_link3 (tf2_ros/static_transform_publisher)
hector_mapping (hector_mapping/hector_mapping)
joystick (joy/joy_node)
laser (tf/static_transform_publisher)
lms1xx (lms1xx/LMS1xx_node)
move_base (move_base/move_base)
points_xyzrgb (nodelet/nodelet)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz (rviz/rviz)
scanmatcher_to_base_footprint (tf/static_transform_publisher)
teleop_velocity_smoother (nodelet/nodelet)
turtlebot_teleop_joystick (turtlebot_teleop/turtlebot_teleop_joy)
volksbot (volksbot_driver/volksbot)
auto-starting new master
process[master]: started with pid [7294]
ROS_MASTER_URI=http://10.12.13.220:11311
setting /run_id to bd63db2e-7c50-11e8-a65f-3c970eb9cf5e
process[rosout-1]: started with pid [7307]
started core service [/rosout]
process[camera/camera_nodelet_manager-2]: started with pid [7325]
process[camera/driver-3]: started with pid [7326]
process[camera/rgb_debayer-4]: started with pid [7327]
process[camera/rgb_rectify_mono-5]: started with pid [7333]
process[camera/rgb_rectify_color-6]: started with pid [7346]
process[camera/ir_rectify_ir-7]: started with pid [7362]
process[camera/depth_rectify_depth-8]: started with pid [7377]
process[camera/depth_metric_rect-9]: started with pid [7390]
[ INFO] [1530354686.393928953]: Initializing nodelet with 4 worker threads.
process[camera/depth_metric-10]: started with pid [7416]
process[camera/depth_points-11]: started with pid [7429]
process[camera/register_depth_rgb-12]: started with pid [7443]
process[camera/points_xyzrgb_sw_registered-13]: started with pid [7455]
process[camera/depth_registered_sw_metric_rect-14]: started with pid [7471]
[ INFO] [1530354686.444805352]: Number devices connected: 1
[ INFO] [1530354686.444869461]: 1. device on bus 000:00 is a Xbox NUI Camera (2ae) from Microsoft (45e) with serial id 'A70777V01080228A'
process[camera/depth_registered_rectify_depth-15]: started with pid [7486]
[ INFO] [1530354686.456866439]: Searching for device with index = 1
process[camera/points_xyzrgb_hw_registered-16]: started with pid [7495]
process[camera/depth_registered_hw_metric_rect-17]: started with pid [7510]
process[camera/depth_registered_metric-18]: started with pid [7519]
process[camera/disparity_depth-19]: started with pid [7530]
process[camera/disparity_registered_sw-20]: started with pid [7550]
process[camera/disparity_registered_hw-21]: started with pid [7561]
process[camera_base_link-22]: started with pid [7581]
process[camera_base_link1-23]: started with pid [7599]
process[camera_base_link2-24]: started with pid [7615]
process[camera_base_link3-25]: started with pid [7630]
process[lms1xx-26]: started with pid [7640]
process[robot_state_publisher-27]: started with pid [7649]
process[volksbot-28]: started with pid [7669]
process[camera-29]: started with pid [7680]
process[laser-30]: started with pid [7699]
process[teleop_velocity_smoother-31]: started with pid [7715]
process[turtlebot_teleop_joystick-32]: started with pid [7733]
process[joystick-33]: started with pid [7748]
process[scanmatcher_to_base_footprint-34]: started with pid [7765]
process[hector_mapping-35]: started with pid [7784]
process[rtabmap/rtabmap-36]: started with pid [7802]
process[move_base-37]: started with pid [7808]
process[rviz-38]: started with pid [7819]
process[points_xyzrgb-39]: started with pid [7827]
process[camera/data_throttle-40]: started with pid [7831]
process[camera/points_xyz_planner-41]: started with pid [7851]
process[camera/obstacles_detection-42]: started with pid [7870]
[ERROR] [1530354686.795187532]: Couldn't open joystick /dev/input/js0. Will retry every second.
[ INFO] [1530354686.844637945]: Starting node...
[ INFO] [1530354686.846734274]: rviz version 1.12.16
[ INFO] [1530354686.846793359]: compiled against Qt version 5.5.1
[ INFO] [1530354686.846825859]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1530354686.917624351]: Initializing nodelet with 8 worker threads.
HectorSM map lvl 0: cellLength: 0.05 res x:2048 res y: 2048
HectorSM map lvl 1: cellLength: 0.1 res x:1024 res y: 1024
[ INFO] [1530354687.028897541]: HectorSM p_base_frame_: base_footprint
[ INFO] [1530354687.029099950]: HectorSM p_map_frame_: hector_map
[ INFO] [1530354687.029436520]: HectorSM p_odom_frame_: odom
[ INFO] [1530354687.029675210]: HectorSM p_scan_topic_: /scan
[ INFO] [1530354687.029896288]: HectorSM p_use_tf_scan_transformation_: true
[ INFO] [1530354687.030098082]: HectorSM p_pub_map_odom_transform_: false
[ INFO] [1530354687.030123796]: HectorSM p_scan_subscriber_queue_size_: 5
[ INFO] [1530354687.030226552]: HectorSM p_map_pub_period_: 2.000000
[ INFO] [1530354687.030336259]: HectorSM p_update_factor_free_: 0.400000
[ INFO] [1530354687.030417076]: HectorSM p_update_factor_occupied_: 0.900000
[ INFO] [1530354687.030438893]: HectorSM p_map_update_distance_threshold_: 0.400000
[ INFO] [1530354687.030558111]: HectorSM p_map_update_angle_threshold_: 0.060000
[ INFO] [1530354687.030632255]: HectorSM p_laser_z_min_value_: -1.000000
[ INFO] [1530354687.030704360]: HectorSM p_laser_z_max_value_: 1.000000
[ INFO] [1530354687.194258240]: Stereo is NOT SUPPORTED
[ INFO] [1530354687.194382292]: OpenGl version: 3 (GLSL 1.3).
[ INFO] [1530354687.474752600]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1530354687.474801318]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1530354687.474835243]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1530354687.474875030]: /rtabmap/rtabmap(maps): map_negative_poses_ignored = true
[ INFO] [1530354687.474903339]: /rtabmap/rtabmap(maps): map_negative_scan_ray_tracing = true
[ INFO] [1530354687.474929818]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1530354687.474957378]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1530354687.474991044]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1530354687.483884900]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1530354687.540840012]: rtabmap: frame_id = base_footprint
[ INFO] [1530354687.540885431]: rtabmap: map_frame_id = map
[ INFO] [1530354687.540904588]: rtabmap: tf_delay = 0.050000
[ INFO] [1530354687.540930645]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1530354687.540955720]: rtabmap: odom_sensor_sync = false
[ INFO] [1530354687.760723695]: Setting RTAB-Map parameter "Grid/FromDepth"="false"
[ INFO] [1530354687.820092971]: Setting RTAB-Map parameter "Icp/CorrespondenceRatio"="0.2"
[ INFO] [1530354687.870237593]: Setting RTAB-Map parameter "Kp/DetectorStrategy"="0"
[ INFO] [1530354687.891288322]: Setting RTAB-Map parameter "Kp/MaxFeatures"="200"
[ INFO] [1530354687.939047094]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="false"
[ INFO] [1530354688.209660584]: Setting RTAB-Map parameter "Optimizer/Strategy"="0"
[ INFO] [1530354688.251151699]: Setting RTAB-Map parameter "RGBD/OptimizeFromGraphEnd"="true"
[ INFO] [1530354688.281923830]: Setting RTAB-Map parameter "RGBD/ProximityPathMaxNeighbors"="10"
[ INFO] [1530354688.287753754]: Setting RTAB-Map parameter "Reg/Force3DoF"="true"
[ INFO] [1530354688.290478514]: Setting RTAB-Map parameter "Reg/Strategy"="1"
Property::loadValue() TODO: error handling - unexpected QVariant type 0.
[ INFO] [1530354688.386503226]: Setting RTAB-Map parameter "SURF/HessianThreshold"="500"
[ INFO] [1530354688.408651602]: Rate=5.000000 Hz
[ INFO] [1530354688.408711880]: Decimation=2
[ INFO] [1530354688.408742540]: Approximate time sync = true
[ INFO] [1530354688.709981469]: Setting RTAB-Map parameter "Vis/InlierDistance"="0.1"
[ INFO] [1530354688.720112669]: Setting RTAB-Map parameter "Vis/MaxDepth"="10.0"
[ INFO] [1530354688.730189426]: Approximate time sync = true
[ INFO] [1530354689.436920174]: Setting "Grid/RangeMax" parameter to 0 (default 5.000000) as "subscribe_scan" or "subscribe_scan_cloud" is true.
[ INFO] [1530354689.441465389]: Update RTAB-Map parameter "Mem/UseOdomFeatures"="false" from database
[ INFO] [1530354689.470725728]: obstacles_detection: Setting parameter "Grid/MaxObstacleHeight"="0.4"
[ INFO] [1530354689.473902392]: obstacles_detection: Setting parameter "Grid/MinClusterSize"="20"
[ INFO] [1530354689.772782427]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1530354689.772930177]: rtabmap: Using database from "/home/roswitha/catkin_ws/src/volksbot_navstack/rtabmap.db" (282 MB).
[ INFO] [1530354691.519248214]: rtabmap: 2D occupancy grid map loaded.
[ INFO] [1530354691.519831284]: rtabmap: Database version = "0.17.3".
[ INFO] [1530354691.555944399]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1530354691.555988771]: /rtabmap/rtabmap: rgbd_cameras = 1
[ INFO] [1530354691.556016547]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1530354691.556088737]: Setup depth callback
[ INFO] [1530354691.599706152]:
/rtabmap/rtabmap subscribed to (approx sync):
/scanmatch_odom,
/camera/rgb/image_rect_color,
/camera/depth_registered/image_raw,
/camera/rgb/camera_info,
/scan
[ INFO] [1530354691.612535133]: rtabmap 0.17.3 started...
[ WARN] [1530354692.117568758]: Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100757 timeout was 0.1.
[ INFO] [1530354692.161322924]: Starting a 3s RGB and Depth stream flush.
[ INFO] [1530354692.161558366]: Opened 'Xbox NUI Camera' on bus 0:0 with serial number 'A70777V01080228A'
[ WARN] [1530354692.597352267]: Could not find any compatible depth output mode for 1. Falling back to default depth output mode 1.
[ INFO] [1530354692.610859635]: rgb_frame_id = 'camera_rgb_optical_frame'
[ INFO] [1530354692.610927699]: depth_frame_id = 'camera_depth_optical_frame'
[ WARN] [1530354692.622722082]: Camera calibration file /home/roswitha/.ros/camera_info/rgb_A70777V01080228A.yaml not found.
[ WARN] [1530354692.622985720]: Using default parameters for RGB camera calibration.
[ WARN] [1530354692.623248373]: Camera calibration file /home/roswitha/.ros/camera_info/depth_A70777V01080228A.yaml not found.
[ WARN] [1530354692.623423254]: Using default parameters for IR camera calibration.
[ WARN] (2018-06-30 12:31:34.216) Rtabmap.cpp:994::process() Update map correction based on last localization saved in database! correction = xyz=0.010760,0.007926,0.000000 rpy=0.000000,0.000000,-0.005287, nearest id = 26 of last pose = xyz=0.009041,0.002464,0.000000 rpy=0.000000,0.000000,-0.002377, odom = xyz=-0.001690,-0.005470,0.000000 rpy=0.000000,-0.000000,0.002910
[ INFO:0] Initialize OpenCL runtime...
[ WARN] (2018-06-30 12:31:34.353) Rtabmap.cpp:1920::process() Rejected loop closure 30 -> 804: Not enough inliers 18/20 (matches=31) between 30 and 804
[ WARN] [1530354694.485938690]: Many occupancy grids should be loaded (~577), this may take a while to update the map(s)...
[ INFO] [1530354694.653466788]: Using plugin "static_layer"
[ INFO] [1530354695.141878950]: Requesting the map...
[ WARN] [1530354695.259226597]: Map(s) updated! (0.773443 s)
[ INFO] [1530354695.261548914]: rtabmap (804): Rate=1.00s, Limit=0.000s, RTAB-Map=0.2438s, Maps update=0.8002s pub=0.0016s (local map=577, WM=577)
[ INFO] [1530354695.281012507]: Creating 1 swatches
[ INFO] [1530354695.285111999]: Stopping device RGB and Depth stream flush.
[ INFO] [1530354695.346428196]: Resizing costmap to 185 X 364 at 0.050000 m/pix
[ INFO] [1530354695.445403865]: Received a 185 X 364 map at 0.050000 m/pix
[ INFO] [1530354695.451558942]: Using plugin "obstacle_layer"
[ INFO] [1530354695.472342597]: Subscribed to Topics: laser_scan_sensor point_cloud_sensorA point_cloud_sensorB
[ INFO] [1530354695.553864188]: Using plugin "inflation_layer"
[ WARN] [1530354695.610822584]: The scan observation buffer has not been updated for 0.13 seconds, and it should be updated every 0.10 seconds.
[ INFO] [1530354695.643160363]: Using plugin "obstacle_layer"
[ INFO] [1530354695.646826665]: Subscribed to Topics: laser_scan_sensor point_cloud_sensorA point_cloud_sensorB
[ INFO] [1530354695.727834098]: Using plugin "inflation_layer"
[ WARN] [1530354695.780159772]: The scan observation buffer has not been updated for 0.12 seconds, and it should be updated every 0.10 seconds.
[ INFO] [1530354695.805618671]: Created local_planner base_local_planner/TrajectoryPlannerROS
[ INFO] [1530354695.820213610]: Sim period is set to 0.10
[ WARN] [1530354696.610809859]: The scan observation buffer has not been updated for 1.13 seconds, and it should be updated every 0.10 seconds.
[ WARN] [1530354696.610857628]: The obstacles_cloud observation buffer has not been updated for 1.10 seconds, and it should be updated every 1.00 seconds.
[ WARN] [1530354696.780241511]: The scan observation buffer has not been updated for 1.12 seconds, and it should be updated every 0.10 seconds.
[ WARN] [1530354696.780301033]: The obstacles_cloud observation buffer has not been updated for 1.09 seconds, and it should be updated every 1.00 seconds.
[ INFO] [1530354696.794136970]: Recovery behavior will clear layer obstacles
[ INFO] [1530354696.796992275]: Recovery behavior will clear layer obstacles
[ INFO] [1530354696.860910762]: odom received!
[ INFO] [1530354697.086307249]: rtabmap (805): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1856s, Maps update=0.0346s pub=0.0005s (local map=577, WM=577)
[ INFO] [1530354697.086547176]: Resizing costmap to 184 X 365 at 0.050000 m/pix
[ INFO] [1530354697.229817665]: Creating 1 swatches
[ INFO] [1530354698.341526388]: rtabmap (806): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1941s, Maps update=0.0392s pub=0.0005s (local map=577, WM=577)
[ INFO] [1530354698.341613179]: Resizing costmap to 182 X 365 at 0.050000 m/pix
[ INFO] [1530354698.506728335]: Creating 1 swatches
[ INFO] [1530354699.569617571]: rtabmap (807): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1593s, Maps update=0.0257s pub=0.0005s (local map=577, WM=577)
[ INFO] [1530354699.569745514]: Resizing costmap to 182 X 365 at 0.050000 m/pix
[ INFO] [1530354700.767878194]: Resizing costmap to 184 X 365 at 0.050000 m/pix
[ INFO] [1530354700.771395364]: rtabmap (808): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1739s, Maps update=0.0333s pub=0.0040s (local map=577, WM=577)
[ INFO] [1530354700.917670753]: Creating 1 swatches
[ INFO] [1530354701.918004274]: Resizing costmap to 181 X 365 at 0.050000 m/pix
[ INFO] [1530354701.918004678]: rtabmap (809): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1679s, Maps update=0.0344s pub=0.0005s (local map=577, WM=577)
[ INFO] [1530354702.049818906]: Creating 1 swatches
[ INFO] [1530354703.104275297]: rtabmap (810): Rate=1.00s, Limit=0.000s, RTAB-Map=0.2070s, Maps update=0.0358s pub=0.0003s (local map=577, WM=577)
[ INFO] [1530354703.104446373]: Resizing costmap to 182 X 365 at 0.050000 m/pix
[ INFO] [1530354703.248805258]: Creating 1 swatches
[ INFO] [1530354704.271465364]: Resizing costmap to 182 X 365 at 0.050000 m/pix
[ INFO] [1530354704.274411289]: rtabmap (811): Rate=1.00s, Limit=0.000s, RTAB-Map=0.2143s, Maps update=0.0328s pub=0.0033s (local map=577, WM=577)
[ INFO] [1530354705.525346028]: Resizing costmap to 182 X 365 at 0.050000 m/pix
[ INFO] [1530354705.525356758]: rtabmap (812): Rate=1.00s, Limit=0.000s, RTAB-Map=0.2182s, Maps update=0.0361s pub=0.0005s (local map=577, WM=577)
[ INFO] [1530354707.110437629]: Resizing costmap to 184 X 365 at 0.050000 m/pix
[ INFO] [1530354707.110447232]: rtabmap (813): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1919s, Maps update=0.0337s pub=0.0007s (local map=577, WM=577)
[ INFO] [1530354707.256015445]: Creating 1 swatches
[ INFO] [1530354708.255108372]: rtabmap (814): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1844s, Maps upd
| Free forum by Nabble | Edit this page |