Re: Demo RTAB-Map on Turtlebot
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Demo-RTAB-Map-on-Turtlebot-tp439p479.html
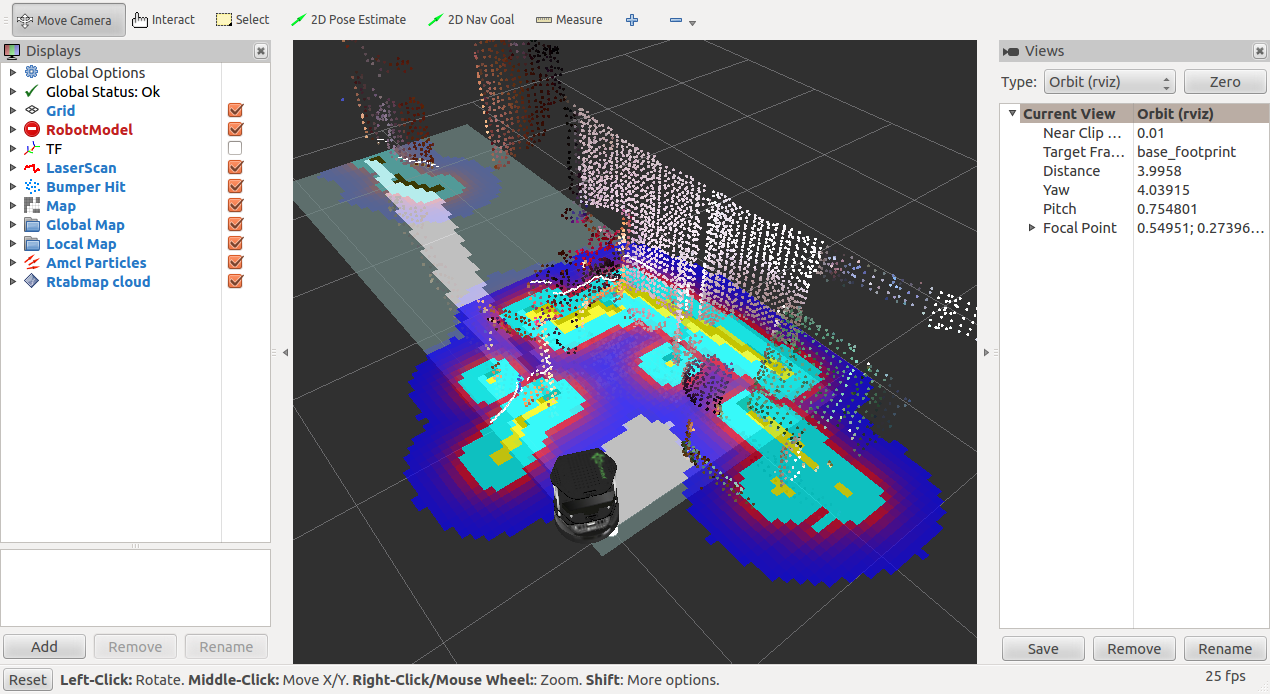
I have updated the first post above for Hydro binaries to create a grid map (backward compatibility issue). For convenience, I also updated how to launch rviz for those using rtabmap from the binaries (Hydro/Indigo/Jade) and not have yet the launch file above already installed.
Example (if you are on the robot, you don't have to set "rgbd_odometry:=true"):
URL: http://official-rtab-map-forum.206.s1.nabble.com/Demo-RTAB-Map-on-Turtlebot-tp439p479.html
I have updated the first post above for Hydro binaries to create a grid map (backward compatibility issue). For convenience, I also updated how to launch rviz for those using rtabmap from the binaries (Hydro/Indigo/Jade) and not have yet the launch file above already installed.
Example (if you are on the robot, you don't have to set "rgbd_odometry:=true"):
$ roslaunch turtlebot_bringup minimal.launch $ roslaunch rtabmap_ros demo_turtlebot_mapping.launch rgbd_odometry:=true args="--delete_db_on_start" version083:=true $ rosrun rviz rviz -d turtlebot_navigation.rviz
| Free forum by Nabble | Edit this page |