Fixed Frame [map] does not exist
Posted by jacksonkr on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Fixed-Frame-map-does-not-exist-tp4806.html
I've run into this issue before but I can't remember how I overcame it.
Here's the terminal setup:
$ roslaunch realsense2_camera rs_camera.launch align_depth:=true
$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rviz:=true rtabmapviz:=false
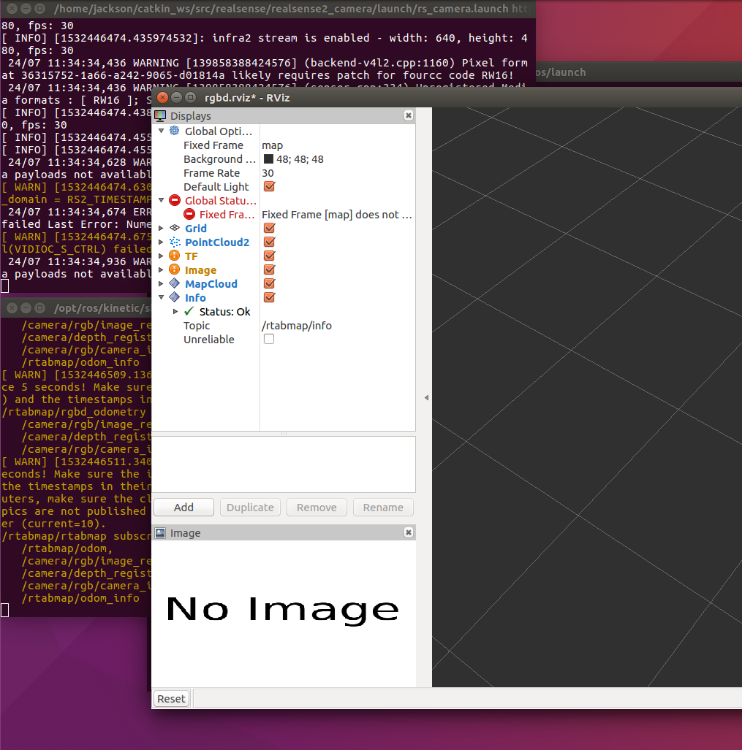
Once rviz pops up I get "Fixed Frame [map] does not exist" for the global status > fixed frame. What's going on here?
URL: http://official-rtab-map-forum.206.s1.nabble.com/Fixed-Frame-map-does-not-exist-tp4806.html
I've run into this issue before but I can't remember how I overcame it.
Here's the terminal setup:
$ roslaunch realsense2_camera rs_camera.launch align_depth:=true
$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rviz:=true rtabmapviz:=false
Once rviz pops up I get "Fixed Frame [map] does not exist" for the global status > fixed frame. What's going on here?
| Free forum by Nabble | Edit this page |