Re: Demo RTAB-Map on Turtlebot
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-process-RGBD-SLAM-datasets-with-RTAB-Map-tp939p4840.html
Hi,
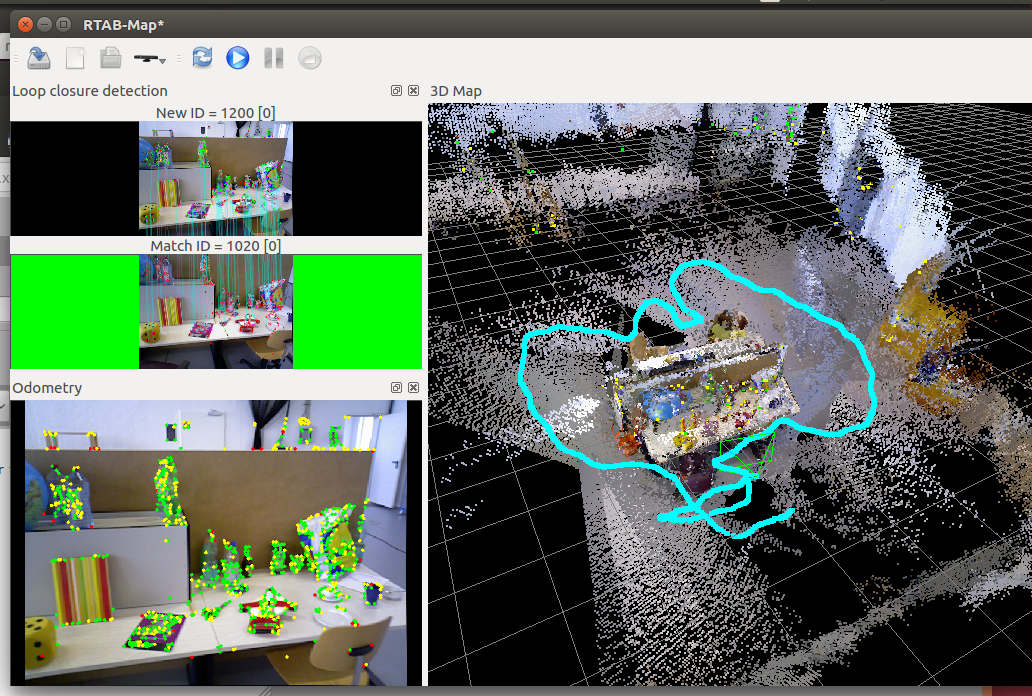
I followed the same steps as the post and they should still work with the latest versions. When the mapping is completed (here I activated intermediate nodes creation like mentioned in the post), press Stop, then do Edit->"Download graph only" with global map optimized option and you should see something like this:
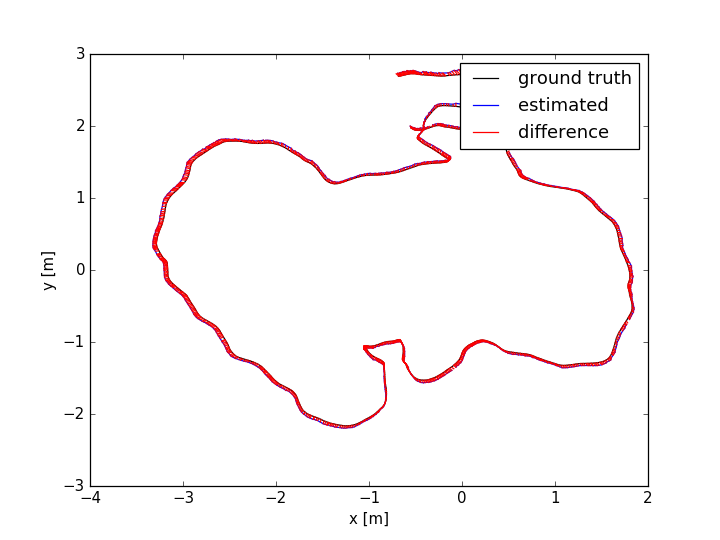
To export poses in RGBD-SLAM format, do File->Export poses... and select RGB-D SLAM format. Save the file to poses.txt for example. With the rgbd-slam evaluation tool:
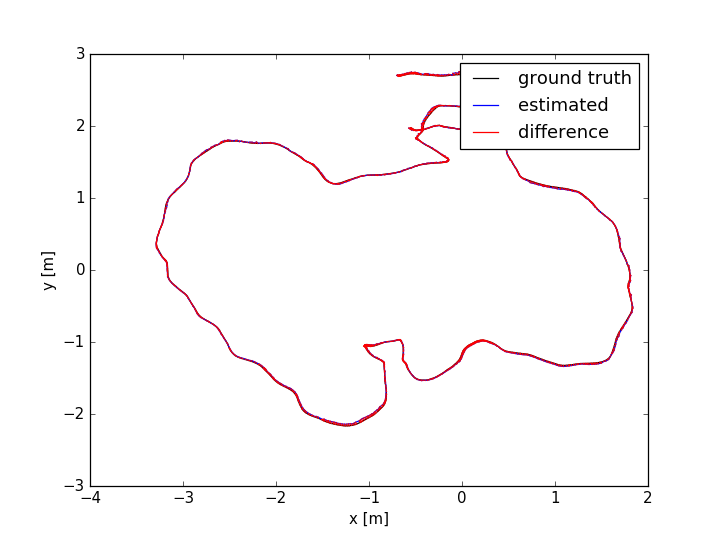
Note that based on the RGB calibration for fr3, you may use these calibration parameters instead (which fix the scale of the trajectory):
which gives:
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-process-RGBD-SLAM-datasets-with-RTAB-Map-tp939p4840.html
Hi,
I followed the same steps as the post and they should still work with the latest versions. When the mapping is completed (here I activated intermediate nodes creation like mentioned in the post), press Stop, then do Edit->"Download graph only" with global map optimized option and you should see something like this:
To export poses in RGBD-SLAM format, do File->Export poses... and select RGB-D SLAM format. Save the file to poses.txt for example. With the rgbd-slam evaluation tool:
$ python evaluate_ate.py groundtruth.txt poses.txt --plot figure.png --offset 0 --scale 1 --verbose compared_pose_pairs 1199 pairs absolute_translational_error.rmse 0.035687 m absolute_translational_error.mean 0.034737 m absolute_translational_error.median 0.033668 m absolute_translational_error.std 0.008178 m absolute_translational_error.min 0.013810 m absolute_translational_error.max 0.084219 m
Note that based on the RGB calibration for fr3, you may use these calibration parameters instead (which fix the scale of the trajectory):
%YAML:1.0
---
camera_name: fr3
image_width: 640
image_height: 480
camera_matrix:
rows: 3
cols: 3
data: [ 5.3539999999999998e+02, 0., 3.2010000000000002e+02, 0.,
5.3920000000000005e+02, 2.4759999999999999e+02, 0., 0., 1. ]which gives:
compared_pose_pairs 1252 pairs absolute_translational_error.rmse 0.022903 m absolute_translational_error.mean 0.018278 m absolute_translational_error.median 0.014916 m absolute_translational_error.std 0.013801 m absolute_translational_error.min 0.001312 m absolute_translational_error.max 0.079146 m
| Free forum by Nabble | Edit this page |