Re: RTAB-Map and Unity integration
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-and-Unity-integration-tp4925p4974.html
Hi,
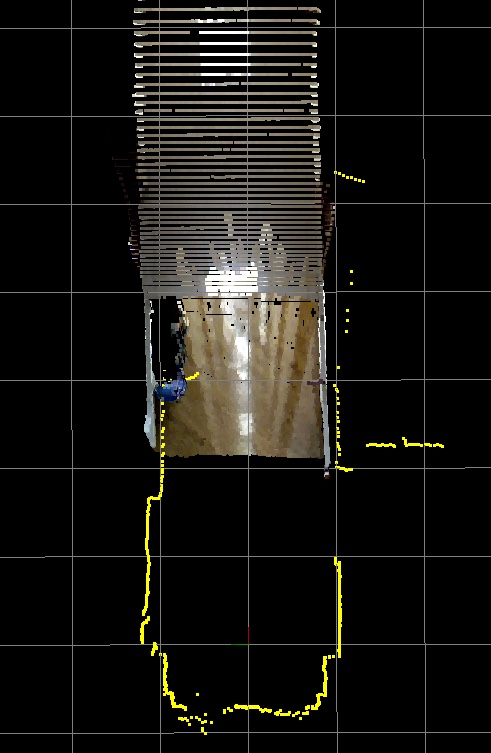
The 2D map created by rtabmap is fine:

The scans look correctly registered, but not the point clouds:
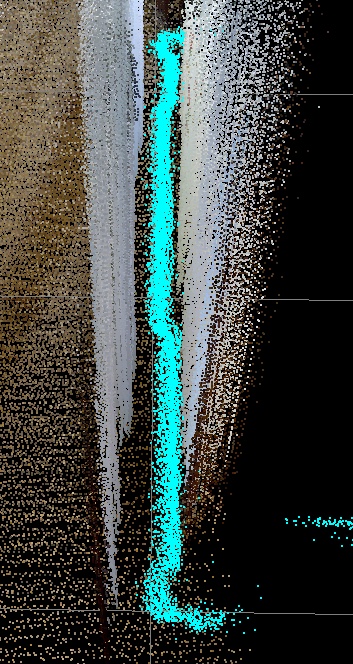
It means that the transform (TF) between the base frame of the robot and the camera frame is not accurate (well, it could be also the transform between base frame and laser frame). We can see better looking with rtabmap-databaseViewer at data of a node:
There is a small rotation (in yaw) and a small offset between the lidar and the camera. To debug this with RVIZ, show the live point cloud of the camera in base frame of the robot while showing the laser scan, the laser scan should match the point cloud if TF between robot base and your sensors is correctly set.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-and-Unity-integration-tp4925p4974.html
Hi,
The 2D map created by rtabmap is fine:
The scans look correctly registered, but not the point clouds:
It means that the transform (TF) between the base frame of the robot and the camera frame is not accurate (well, it could be also the transform between base frame and laser frame). We can see better looking with rtabmap-databaseViewer at data of a node:
There is a small rotation (in yaw) and a small offset between the lidar and the camera. To debug this with RVIZ, show the live point cloud of the camera in base frame of the robot while showing the laser scan, the laser scan should match the point cloud if TF between robot base and your sensors is correctly set.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |