Re: How to obtain corrected Odometry to display in rviz?
Posted by ArkadiuszN on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-obtain-corrected-Odometry-to-display-in-rviz-tp4989p5004.html
I think the problem is that zed-ros-wrapper also publishes tf /odom->/map. These are frames without rtabmap:
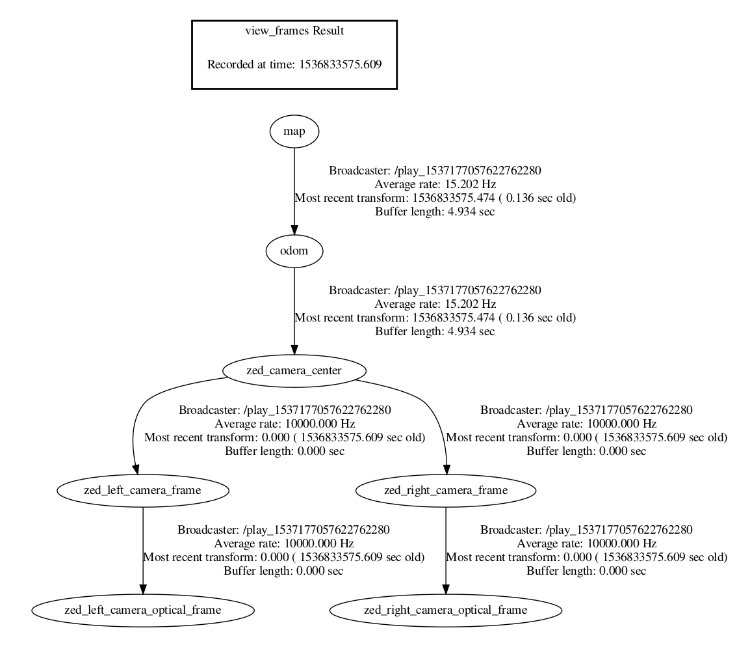
I am not able to do what you wrote, I have also tried to change /map in zed-ros-wrapper to different name but it also did not allow me to obtain ODOM i corrected frame...
Edit: I have set publish_tf to false in zed wrapper and now get tree like this:
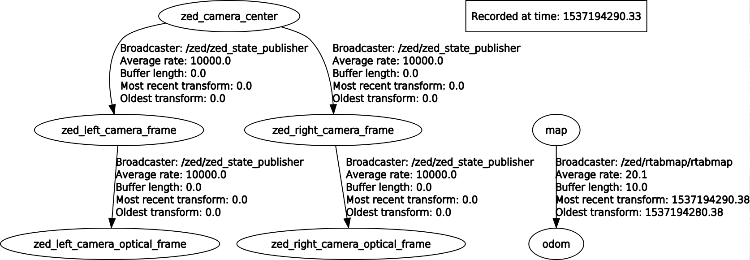
I think that odometry behaves as you described. Is this correct?
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-obtain-corrected-Odometry-to-display-in-rviz-tp4989p5004.html
I think the problem is that zed-ros-wrapper also publishes tf /odom->/map. These are frames without rtabmap:
I am not able to do what you wrote, I have also tried to change /map in zed-ros-wrapper to different name but it also did not allow me to obtain ODOM i corrected frame...
Edit: I have set publish_tf to false in zed wrapper and now get tree like this:
I think that odometry behaves as you described. Is this correct?
| Free forum by Nabble | Edit this page |